 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAERR-Nav: Adaptive Exploration-Recovery-Reminiscing Strategy for Zero-Shot Object Navigation
Mar 18, 2026Zero-Shot Object Navigation (ZSON) in unknown multi-floor environments presents a significant challenge. Recent methods, mostly based on semantic value greedy waypoint selection, spatial topology-enhanced memory, and Multimodal Large Language Model (MLLM) as a decision-making framework, have led to improvements. However, these architectures struggle to balance exploration and exploitation for ZSON when encountering unseen environments, especially in multi-floor settings, such as robots getting stuck at narrow intersections, endlessly wandering, or failing to find stair entrances. To overcome these challenges, we propose AERR-Nav, a Zero-Shot Object Navigation framework that dynamically adjusts its state based on the robot's environment. Specifically, AERR-Nav has the following two key advantages: (1) An Adaptive Exploration-Recovery-Reminiscing Strategy, enables robots to dynamically transition between three states, facilitating specialized responses to diverse navigation scenarios. (2) An Adaptive Exploration State featuring Fast and Slow-Thinking modes helps robots better balance exploration, exploitation, and higher-level reasoning based on evolving environmental information. Extensive experiments on the HM3D and MP3D benchmarks demonstrate that our AERR-Nav achieves state-of-the-art performance among zero-shot methods. Comprehensive ablation studies further validate the efficacy of our proposed strategy and modules.
Instance Neural Radiance Field
Apr 10, 2023This paper presents one of the first learning-based NeRF 3D instance segmentation pipelines, dubbed as Instance Neural Radiance Field, or Instance NeRF. Taking a NeRF pretrained from multi-view RGB images as input, Instance NeRF can learn 3D instance segmentation of a given scene, represented as an instance field component of the NeRF model. To this end, we adopt a 3D proposal-based mask prediction network on the sampled volumetric features from NeRF, which generates discrete 3D instance masks. The coarse 3D mask prediction is then projected to image space to match 2D segmentation masks from different views generated by existing panoptic segmentation models, which are used to supervise the training of the instance field. Notably, beyond generating consistent 2D segmentation maps from novel views, Instance NeRF can query instance information at any 3D point, which greatly enhances NeRF object segmentation and manipulation. Our method is also one of the first to achieve such results without ground-truth instance information during inference. Experimented on synthetic and real-world NeRF datasets with complex indoor scenes, Instance NeRF surpasses previous NeRF segmentation works and competitive 2D segmentation methods in segmentation performance on unseen views. See the demo video at https://youtu.be/wW9Bme73coI.
NeRF-RPN: A general framework for object detection in NeRFs
Nov 22, 2022

This paper presents the first significant object detection framework, NeRF-RPN, which directly operates on NeRF. Given a pre-trained NeRF model, NeRF-RPN aims to detect all bounding boxes of objects in a scene. By exploiting a novel voxel representation that incorporates multi-scale 3D neural volumetric features, we demonstrate it is possible to regress the 3D bounding boxes of objects in NeRF directly without rendering the NeRF at any viewpoint. NeRF-RPN is a general framework and can be applied to detect objects without class labels. We experimented the NeRF-RPN with various backbone architectures, RPN head designs and loss functions. All of them can be trained in an end-to-end manner to estimate high quality 3D bounding boxes. To facilitate future research in object detection for NeRF, we built a new benchmark dataset which consists of both synthetic and real-world data with careful labeling and clean up. Please click https://youtu.be/M8_4Ih1CJjE for visualizing the 3D region proposals by our NeRF-RPN. Code and dataset will be made available.
Trash to Treasure: Harvesting OOD Data with Cross-Modal Matching for Open-Set Semi-Supervised Learning
Aug 12, 2021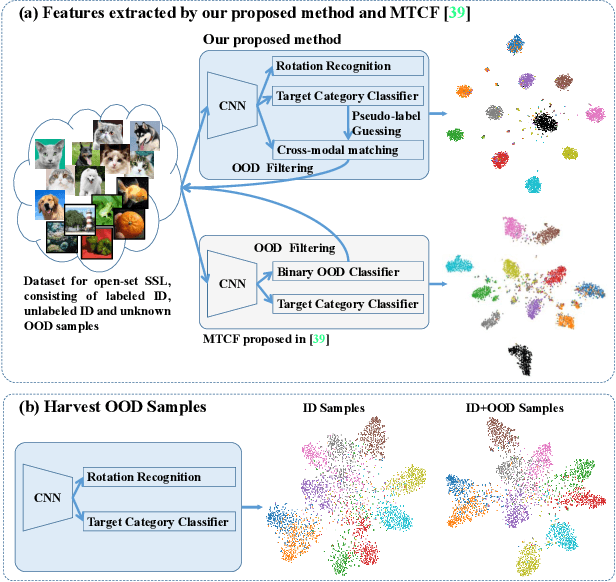
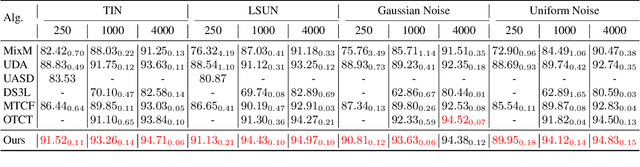
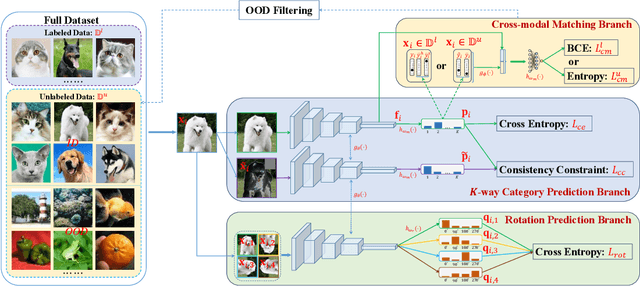

Open-set semi-supervised learning (open-set SSL) investigates a challenging but practical scenario where out-of-distribution (OOD) samples are contained in the unlabeled data. While the mainstream technique seeks to completely filter out the OOD samples for semi-supervised learning (SSL), we propose a novel training mechanism that could effectively exploit the presence of OOD data for enhanced feature learning while avoiding its adverse impact on the SSL. We achieve this goal by first introducing a warm-up training that leverages all the unlabeled data, including both the in-distribution (ID) and OOD samples. Specifically, we perform a pretext task that enforces our feature extractor to obtain a high-level semantic understanding of the training images, leading to more discriminative features that can benefit the downstream tasks. Since the OOD samples are inevitably detrimental to SSL, we propose a novel cross-modal matching strategy to detect OOD samples. Instead of directly applying binary classification, we train the network to predict whether the data sample is matched to an assigned one-hot class label. The appeal of the proposed cross-modal matching over binary classification is the ability to generate a compatible feature space that aligns with the core classification task. Extensive experiments show that our approach substantially lifts the performance on open-set SSL and outperforms the state-of-the-art by a large margin.