 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping, Analyzing, and Evaluating Self-Drive Algorithms Using Drive-by-Wire Electric Vehicles
Sep 04, 2024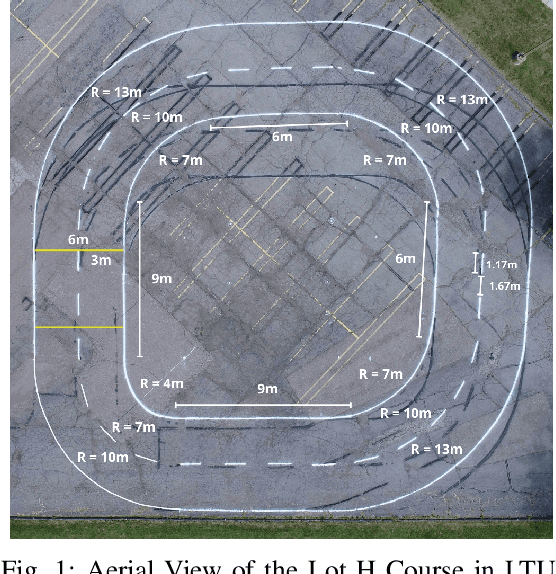
Reliable lane-following algorithms are essential for safe and effective autonomous driving. This project was primarily focused on developing and evaluating different lane-following programs to find the most reliable algorithm for a Vehicle to Everything (V2X) project. The algorithms were first tested on a simulator and then with real vehicles equipped with a drive-by-wire system using ROS (Robot Operating System). Their performance was assessed through reliability, comfort, speed, and adaptability metrics. The results show that the two most reliable approaches detect both lane lines and use unsupervised learning to separate them. These approaches proved to be robust in various driving scenarios, making them suitable candidates for integration into the V2X project.
Vehicle-to-Everything (V2X) Communication: A Roadside Unit for Adaptive Intersection Control of Autonomous Electric Vehicles
Sep 01, 2024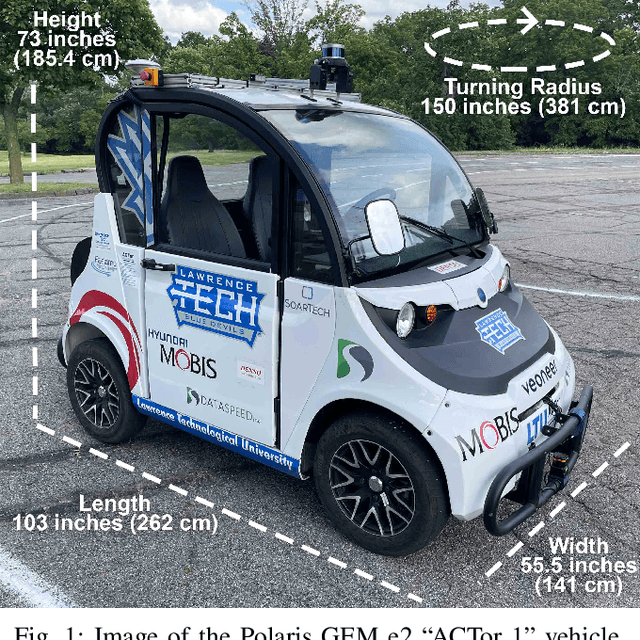
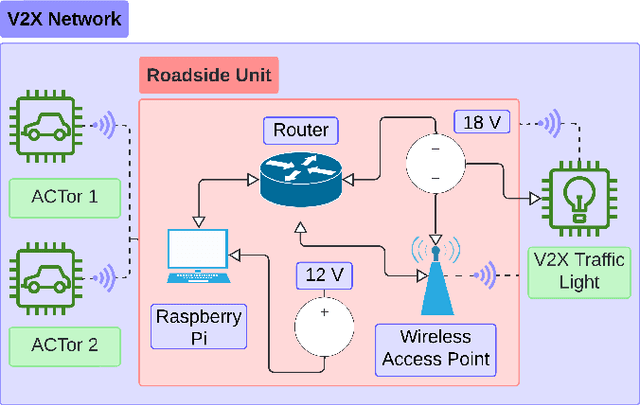
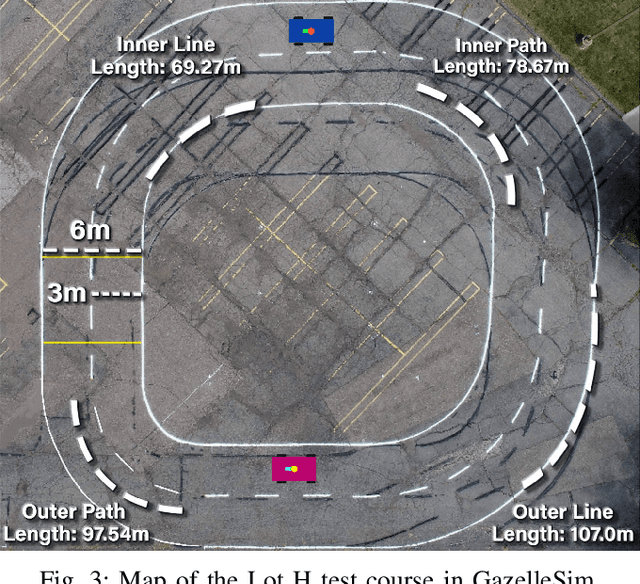
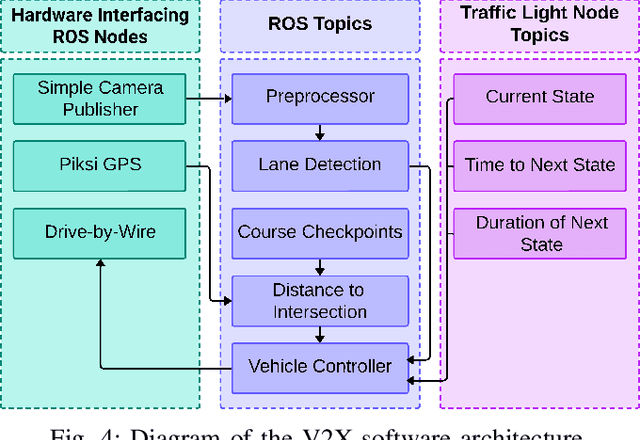
Recent advances in autonomous vehicle technologies and cellular network speeds motivate developments in vehicle-to-everything (V2X) communications. Enhanced road safety features and improved fuel efficiency are some of the motivations behind V2X for future transportation systems. Adaptive intersection control systems have considerable potential to achieve these goals by minimizing idle times and predicting short-term future traffic conditions. Integrating V2X into traffic management systems introduces the infrastructure necessary to make roads safer for all users and initiates the shift towards more intelligent and connected cities. To demonstrate our solution, we implement both a simulated and real-world representation of a 4-way intersection and crosswalk scenario with 2 self-driving electric vehicles, a roadside unit (RSU), and traffic light. Our architecture minimizes fuel consumption through intersections by reducing acceleration and braking by up to 75.35%. We implement a cost-effective solution to intelligent and connected intersection control to serve as a proof-of-concept model suitable as the basis for continued research and development. Code for this project is available at https://github.com/MMachado05/REU-2024.
Impact of Network Topology on Byzantine Resilience in Decentralized Federated Learning
Jul 06, 2024



Federated learning (FL) enables a collaborative environment for training machine learning models without sharing training data between users. This is typically achieved by aggregating model gradients on a central server. Decentralized federated learning is a rising paradigm that enables users to collaboratively train machine learning models in a peer-to-peer manner, without the need for a central aggregation server. However, before applying decentralized FL in real-world use training environments, nodes that deviate from the FL process (Byzantine nodes) must be considered when selecting an aggregation function. Recent research has focused on Byzantine-robust aggregation for client-server or fully connected networks, but has not yet evaluated such aggregation schemes for complex topologies possible with decentralized FL. Thus, the need for empirical evidence of Byzantine robustness in differing network topologies is evident. This work investigates the effects of state-of-the-art Byzantine-robust aggregation methods in complex, large-scale network structures. We find that state-of-the-art Byzantine robust aggregation strategies are not resilient within large non-fully connected networks. As such, our findings point the field towards the development of topology-aware aggregation schemes, especially necessary within the context of large scale real-world deployment.
Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Jun 11, 2024



Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Cyberphysical Sequencing for Distributed Asset Management with Broad Traceability
Dec 01, 2021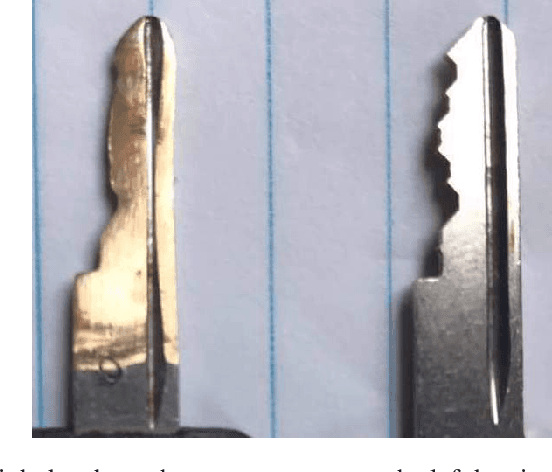
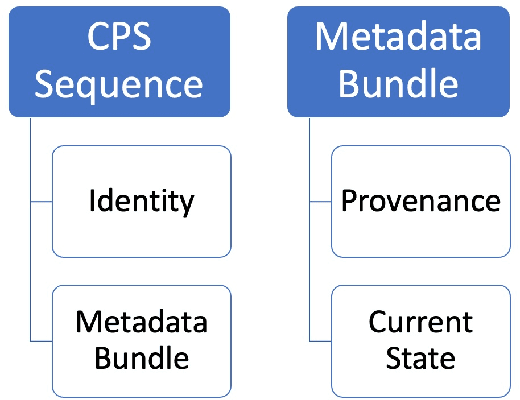
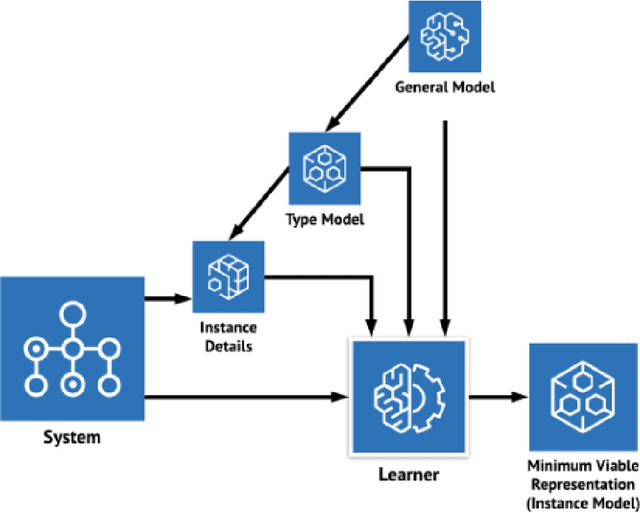
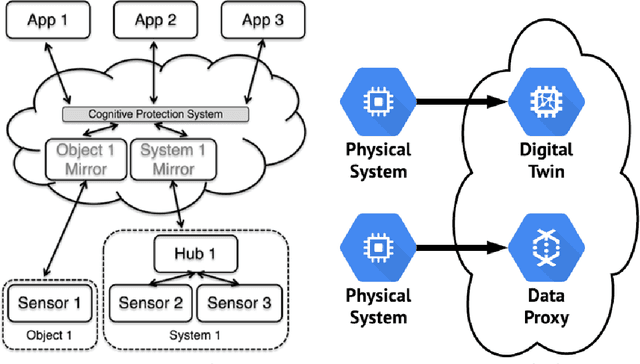
Cyber-Physical systems (CPS) have complex lifecycles involving multiple stakeholders, and the transparency of both hardware and software components' supply chain is opaque at best. This raises concerns for stakeholders who may not trust that what they receive is what was requested. There is an opportunity to build a cyberphysical titling process offering universal traceability and the ability to differentiate systems based on provenance. Today, RFID tags and barcodes address some of these needs, though they are easily manipulated due to non-linkage with an object or system's intrinsic characteristics. We propose cyberphysical sequencing as a low-cost, light-weight and pervasive means of adding track-and-trace capabilities to any asset that ties a system's physical identity to a unique and invariant digital identifier. CPS sequencing offers benefits similar Digital Twins' for identifying and managing the provenance and identity of an asset throughout its life with far fewer computational and other resources.