 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeveloping, Analyzing, and Evaluating Self-Drive Algorithms Using Drive-by-Wire Electric Vehicles
Sep 04, 2024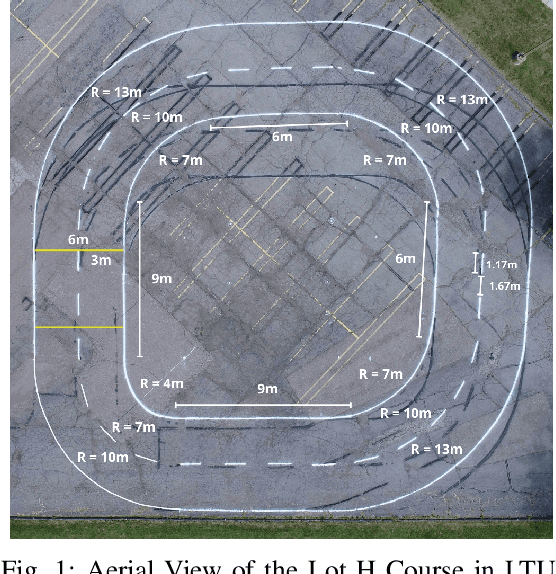
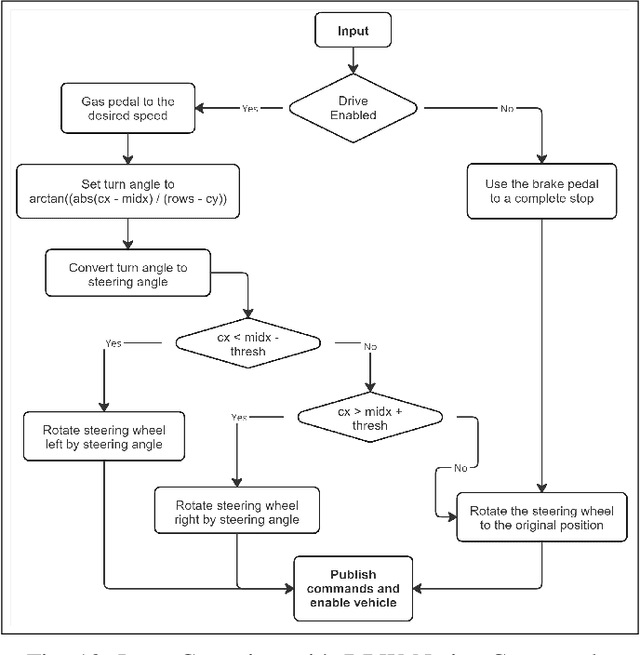
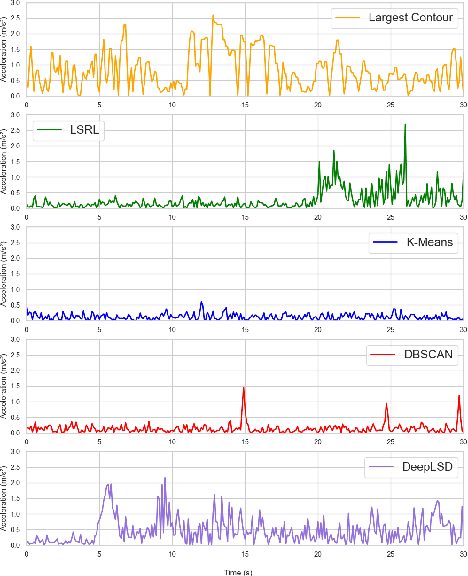
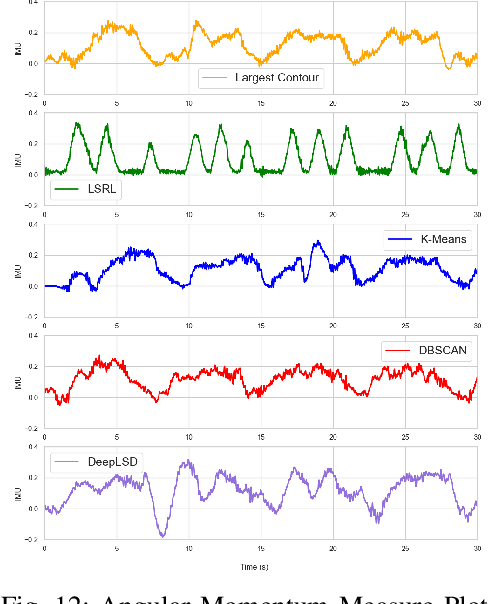
Reliable lane-following algorithms are essential for safe and effective autonomous driving. This project was primarily focused on developing and evaluating different lane-following programs to find the most reliable algorithm for a Vehicle to Everything (V2X) project. The algorithms were first tested on a simulator and then with real vehicles equipped with a drive-by-wire system using ROS (Robot Operating System). Their performance was assessed through reliability, comfort, speed, and adaptability metrics. The results show that the two most reliable approaches detect both lane lines and use unsupervised learning to separate them. These approaches proved to be robust in various driving scenarios, making them suitable candidates for integration into the V2X project.
Vehicle-to-Everything (V2X) Communication: A Roadside Unit for Adaptive Intersection Control of Autonomous Electric Vehicles
Sep 01, 2024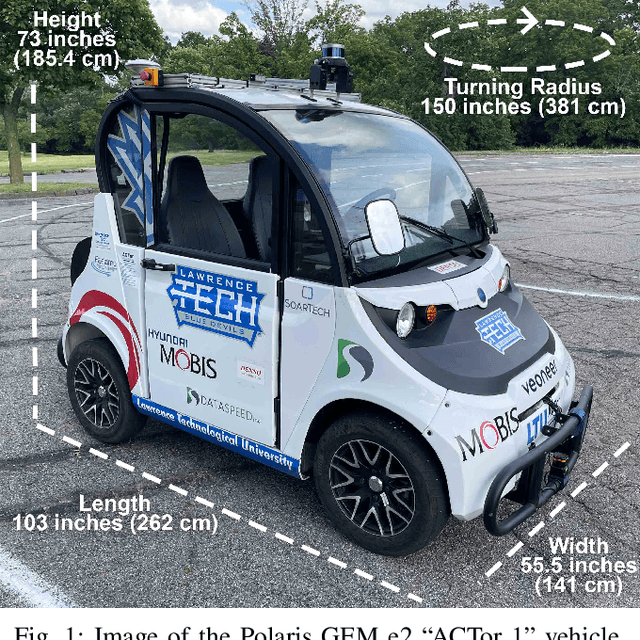
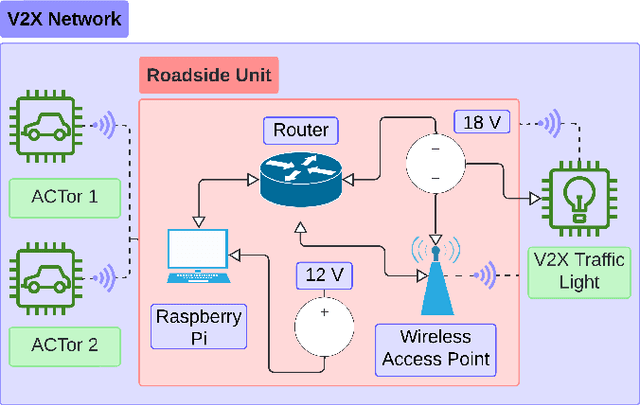
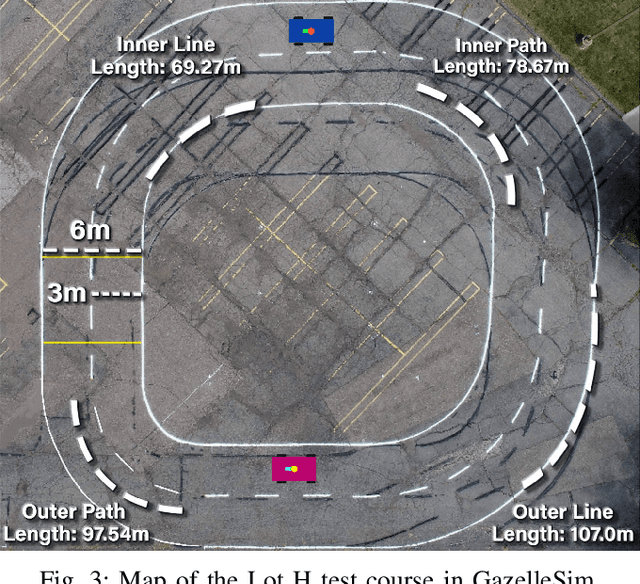
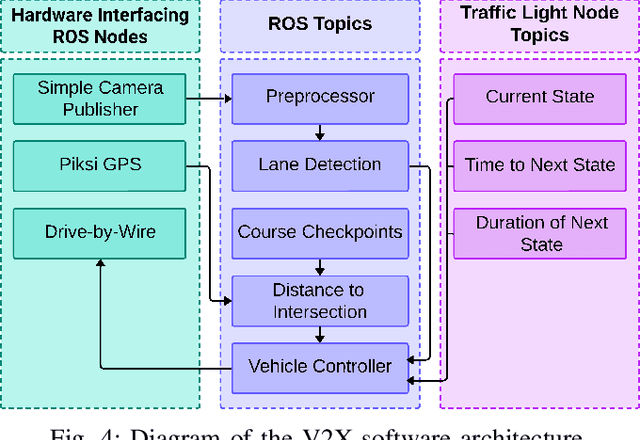
Recent advances in autonomous vehicle technologies and cellular network speeds motivate developments in vehicle-to-everything (V2X) communications. Enhanced road safety features and improved fuel efficiency are some of the motivations behind V2X for future transportation systems. Adaptive intersection control systems have considerable potential to achieve these goals by minimizing idle times and predicting short-term future traffic conditions. Integrating V2X into traffic management systems introduces the infrastructure necessary to make roads safer for all users and initiates the shift towards more intelligent and connected cities. To demonstrate our solution, we implement both a simulated and real-world representation of a 4-way intersection and crosswalk scenario with 2 self-driving electric vehicles, a roadside unit (RSU), and traffic light. Our architecture minimizes fuel consumption through intersections by reducing acceleration and braking by up to 75.35%. We implement a cost-effective solution to intelligent and connected intersection control to serve as a proof-of-concept model suitable as the basis for continued research and development. Code for this project is available at https://github.com/MMachado05/REU-2024.