 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnsuring Computer Science Learning in the AI Era: Open Generative AI Policies and Assignment-Driven Written Quizzes
Jan 16, 2026The widespread availability of generative artificial intelligence (GenAI) has created a pressing challenge in computer science (CS) education: how to incorporate powerful AI tools into programming coursework without undermining student learning through cognitive offloading. This paper presents an assessment model that permits the use of generative AI for take-home programming assignments while enforcing individual mastery through immediate, assignment-driven written quizzes. To promote authentic learning, these in-class, closed-book assessments are weighted more heavily than the assignments themselves and are specifically designed to verify the student's comprehension of the algorithms, structure, and implementation details of their submitted code. Preliminary empirical data were collected from an upper-level computer science course to examine the relationship between self-reported GenAI usage and performance on AI-free quizzes, exams, and final course grades. Statistical analyses revealed no meaningful linear correlation between GenAI usage levels and assessment outcomes, with Pearson correlation coefficients consistently near zero. These preliminary results suggest that allowing GenAI for programming assignments does not diminish students' mastery of course concepts when learning is verified through targeted, assignment-driven quizzes. Although limited by a small sample size, this study provides preliminary evidence that the risks of cognitive offloading can be mitigated by allowing AI-assisted programming practice while verifying understanding through assignment-driven, AI-free quizzes. The findings support the responsible adoption of open GenAI policies in upper-level CS courses, when paired with rigorous, independent assessment mechanisms.
Developing, Analyzing, and Evaluating Self-Drive Algorithms Using Drive-by-Wire Electric Vehicles
Sep 04, 2024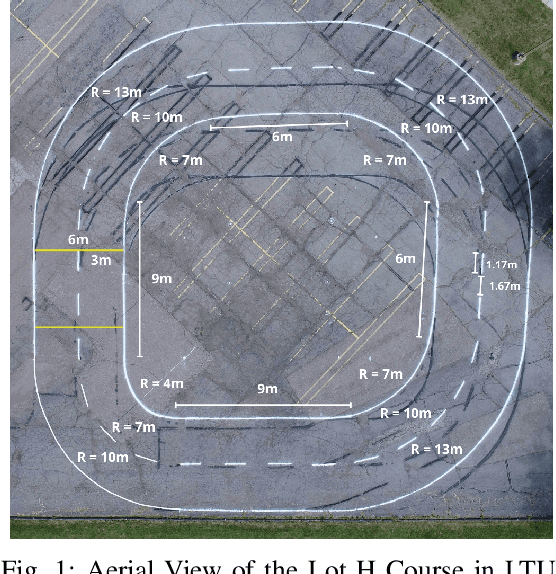
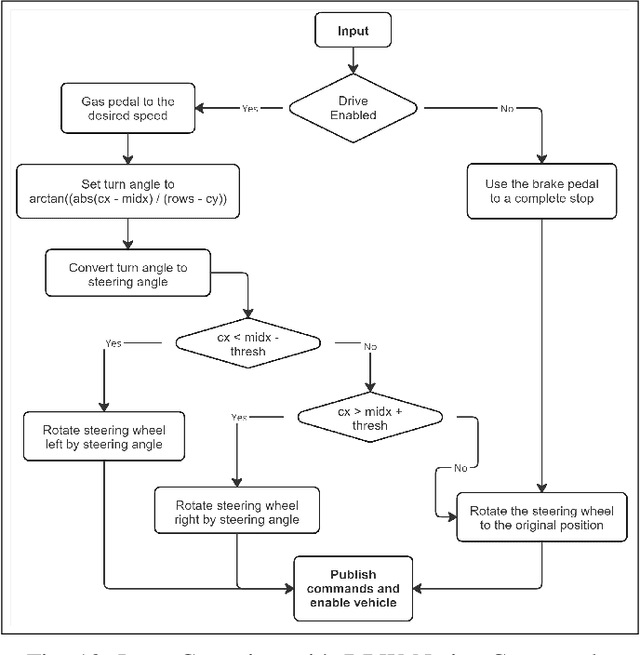
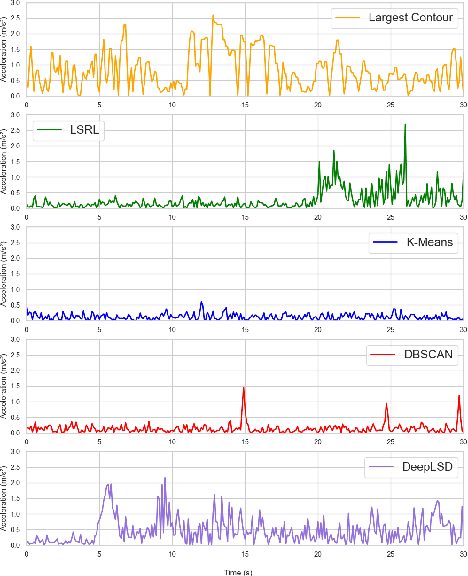
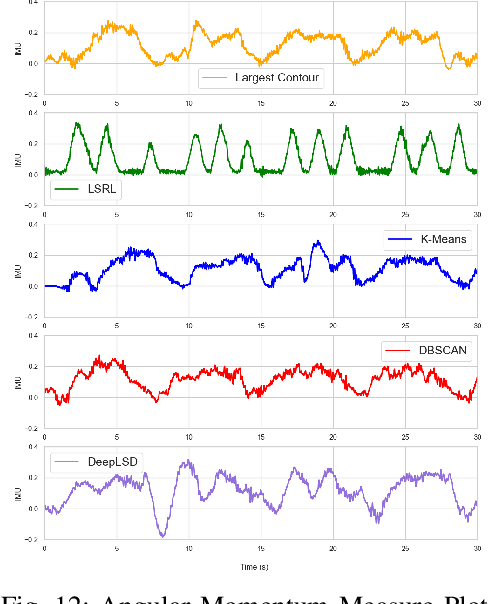
Reliable lane-following algorithms are essential for safe and effective autonomous driving. This project was primarily focused on developing and evaluating different lane-following programs to find the most reliable algorithm for a Vehicle to Everything (V2X) project. The algorithms were first tested on a simulator and then with real vehicles equipped with a drive-by-wire system using ROS (Robot Operating System). Their performance was assessed through reliability, comfort, speed, and adaptability metrics. The results show that the two most reliable approaches detect both lane lines and use unsupervised learning to separate them. These approaches proved to be robust in various driving scenarios, making them suitable candidates for integration into the V2X project.
Vehicle-to-Everything (V2X) Communication: A Roadside Unit for Adaptive Intersection Control of Autonomous Electric Vehicles
Sep 01, 2024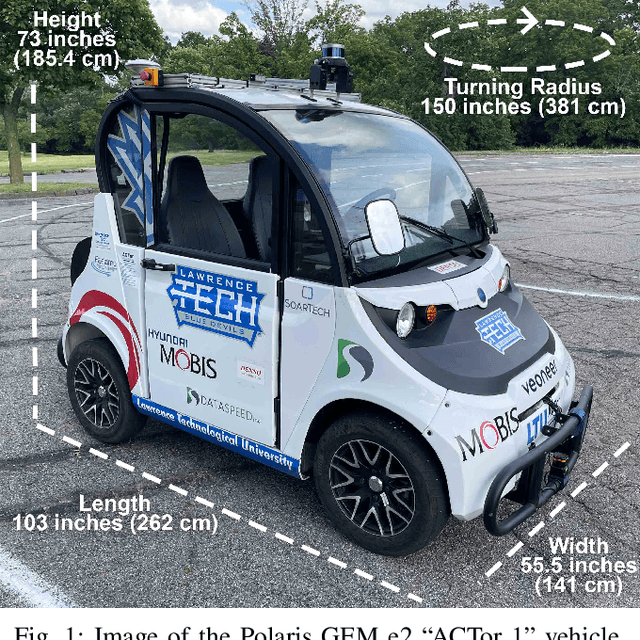
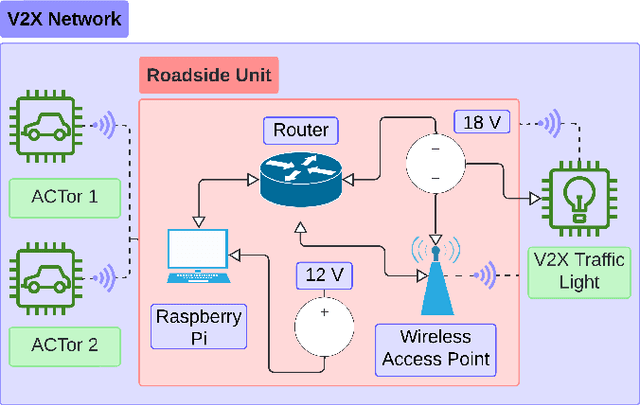
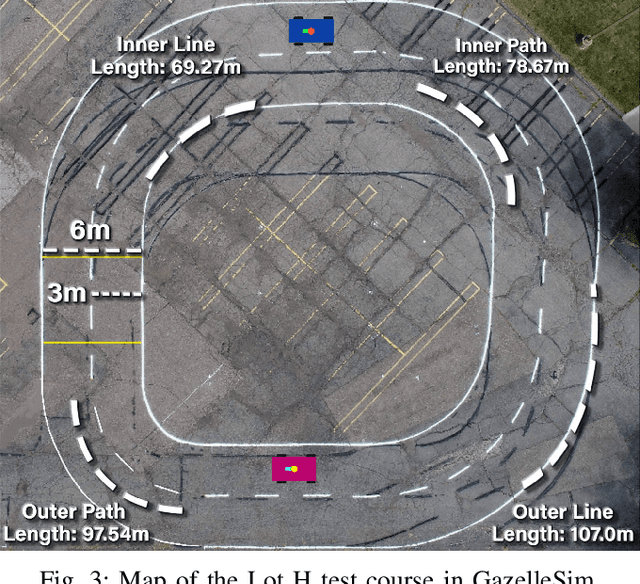
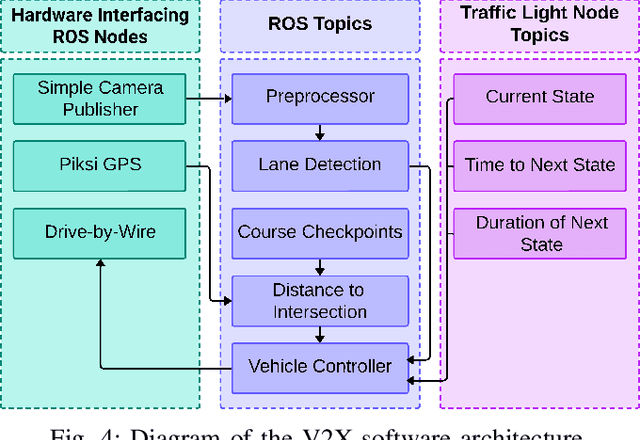
Recent advances in autonomous vehicle technologies and cellular network speeds motivate developments in vehicle-to-everything (V2X) communications. Enhanced road safety features and improved fuel efficiency are some of the motivations behind V2X for future transportation systems. Adaptive intersection control systems have considerable potential to achieve these goals by minimizing idle times and predicting short-term future traffic conditions. Integrating V2X into traffic management systems introduces the infrastructure necessary to make roads safer for all users and initiates the shift towards more intelligent and connected cities. To demonstrate our solution, we implement both a simulated and real-world representation of a 4-way intersection and crosswalk scenario with 2 self-driving electric vehicles, a roadside unit (RSU), and traffic light. Our architecture minimizes fuel consumption through intersections by reducing acceleration and braking by up to 75.35%. We implement a cost-effective solution to intelligent and connected intersection control to serve as a proof-of-concept model suitable as the basis for continued research and development. Code for this project is available at https://github.com/MMachado05/REU-2024.
Developing, Analyzing, and Evaluating Vehicular Lane Keeping Algorithms Under Dynamic Lighting and Weather Conditions Using Electric Vehicles
Jun 11, 2024



Self-driving vehicles have the potential to reduce accidents and fatalities on the road. Many production vehicles already come equipped with basic self-driving capabilities, but have trouble following lanes in adverse lighting and weather conditions. Therefore, we develop, analyze, and evaluate two vehicular lane-keeping algorithms under dynamic weather conditions using a combined deep learning- and hand-crafted approach and an end-to-end deep learning approach. We use image segmentation- and linear-regression based deep learning to drive the vehicle toward the center of the lane, measuring the amount of laps completed, average speed, and average steering error per lap. Our hybrid model completes more laps than our end-to-end deep learning model. In the future, we are interested in combining our algorithms to form one cohesive approach to lane-following.
Rapid Development of a Mobile Robot Simulation Environment
Aug 09, 2022


Robotics simulation provides many advantages during the development of an intelligent ground vehicle (IGV) such as testing the software components in varying scenarios without requiring a complete physical robot. This paper discusses a 3D simulation environment created using rapid application development and the Unity game engine to enable testing during a mobile robotics competition. Our experience shows that the simulation environment contributed greatly to the development of software for the competition. The simulator also contributed to the hardware development of the robot.
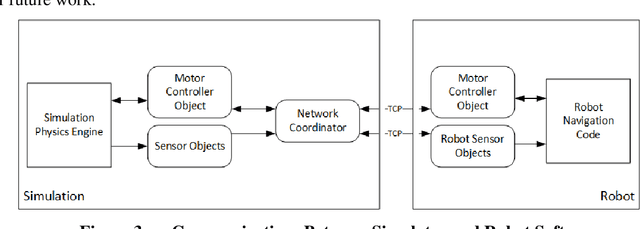
A Successful Integration of the Robotic Technology Kernel (RTK) for a By-Wire Electric Vehicle System with a Mobile App Interface
Aug 06, 2022
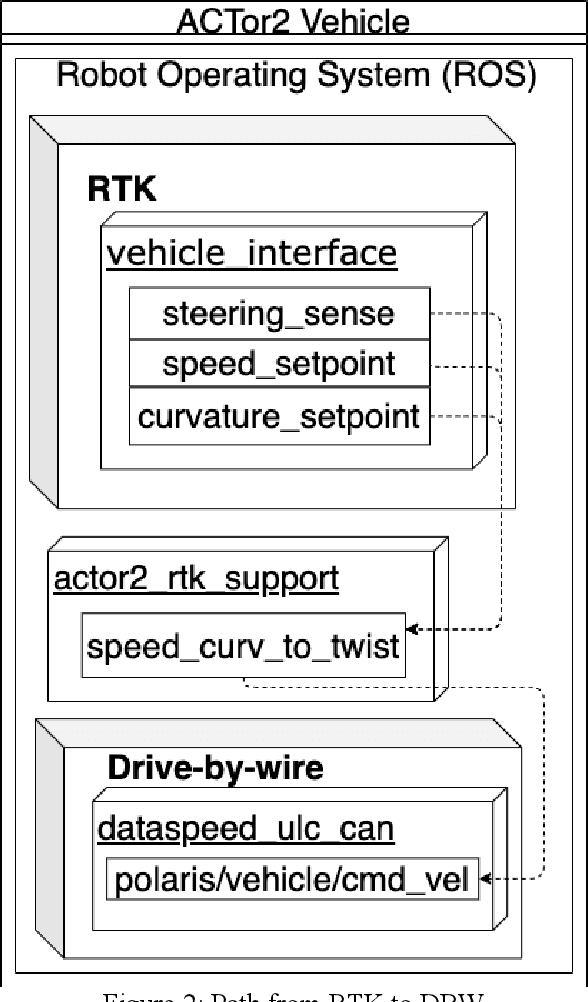
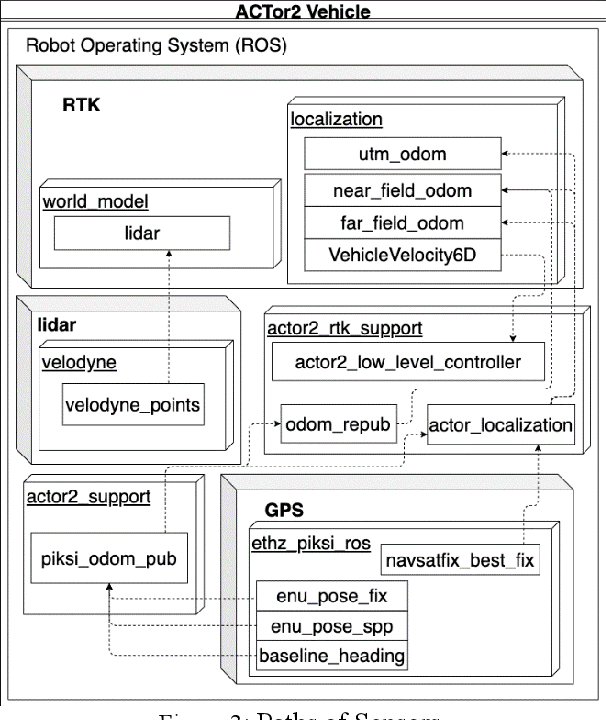
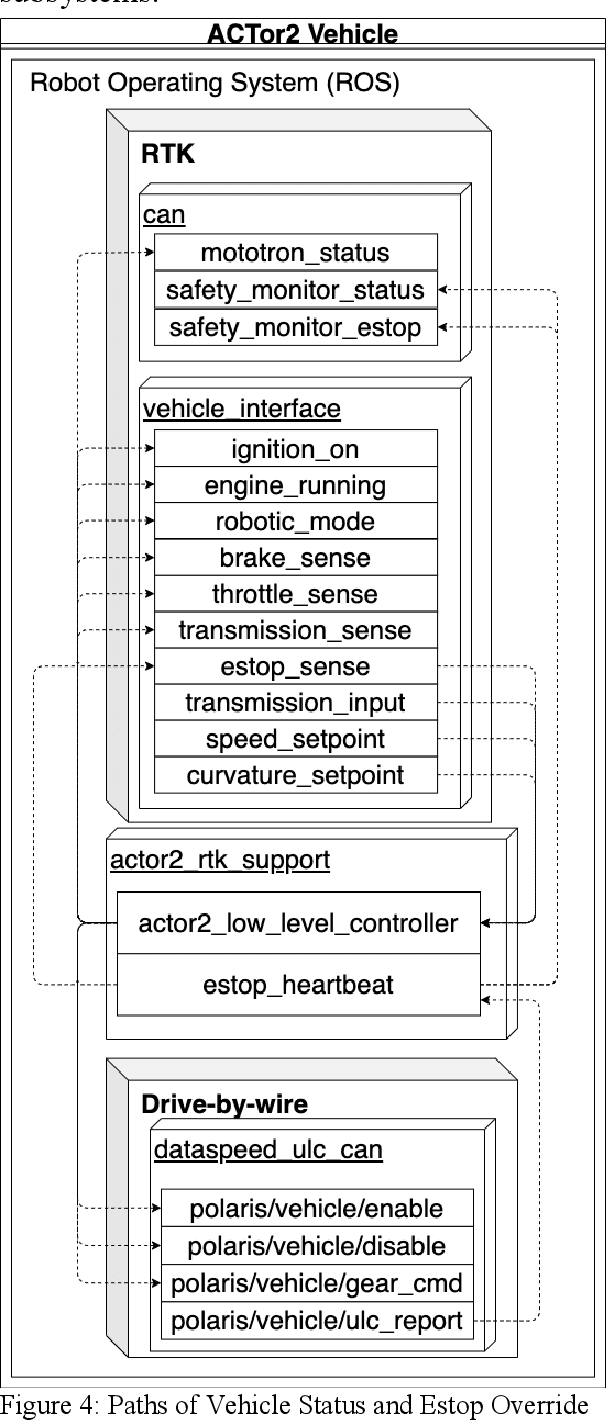
We were able to complete the full integration of the Robotic Technology Kernel (RTK) into an electric vehicle by-wire system using lidar and GPS sensors. The solution included a mobile application to interface with the RTK-enabled autonomous vehicle. Altogether the system was designed to be modular, using the concepts of message-based software design that is built into the Robot Operating System (ROS), which is at the foundation of RTK. The team worked incrementally to develop working software to demonstrate each milestone on the path to successfully completing the RTK integration for the development of an application called the Vehicle Summoning System (VSS).