Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Successful Integration of the Robotic Technology Kernel (RTK) for a By-Wire Electric Vehicle System with a Mobile App Interface
Aug 06, 2022
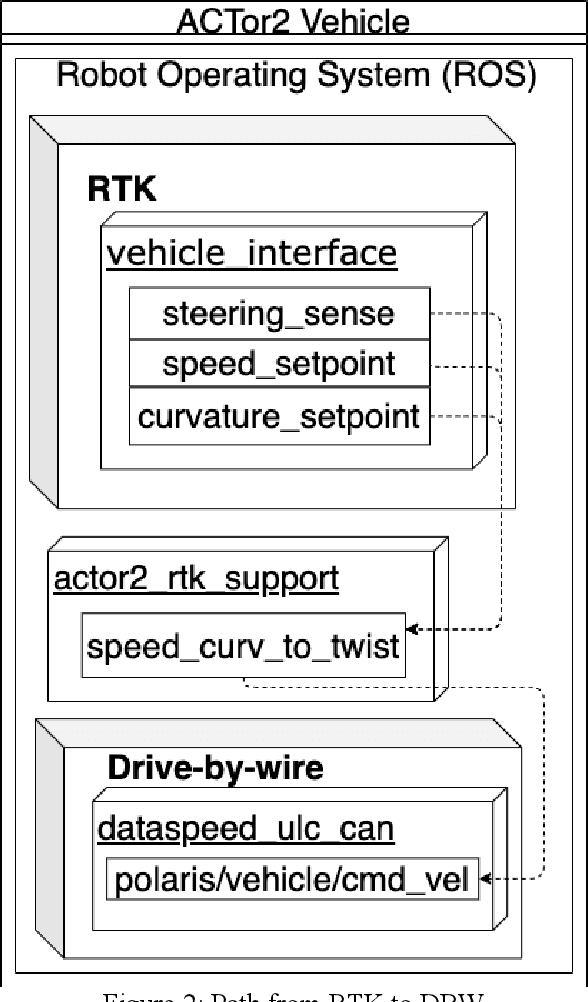
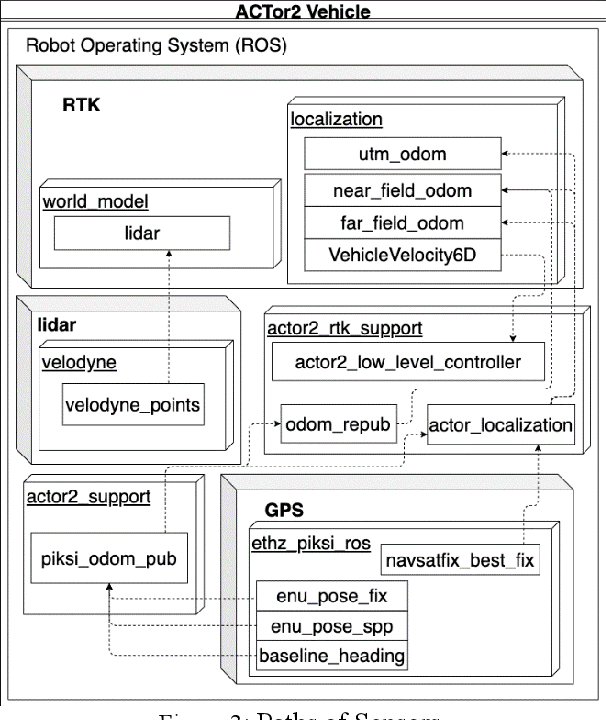
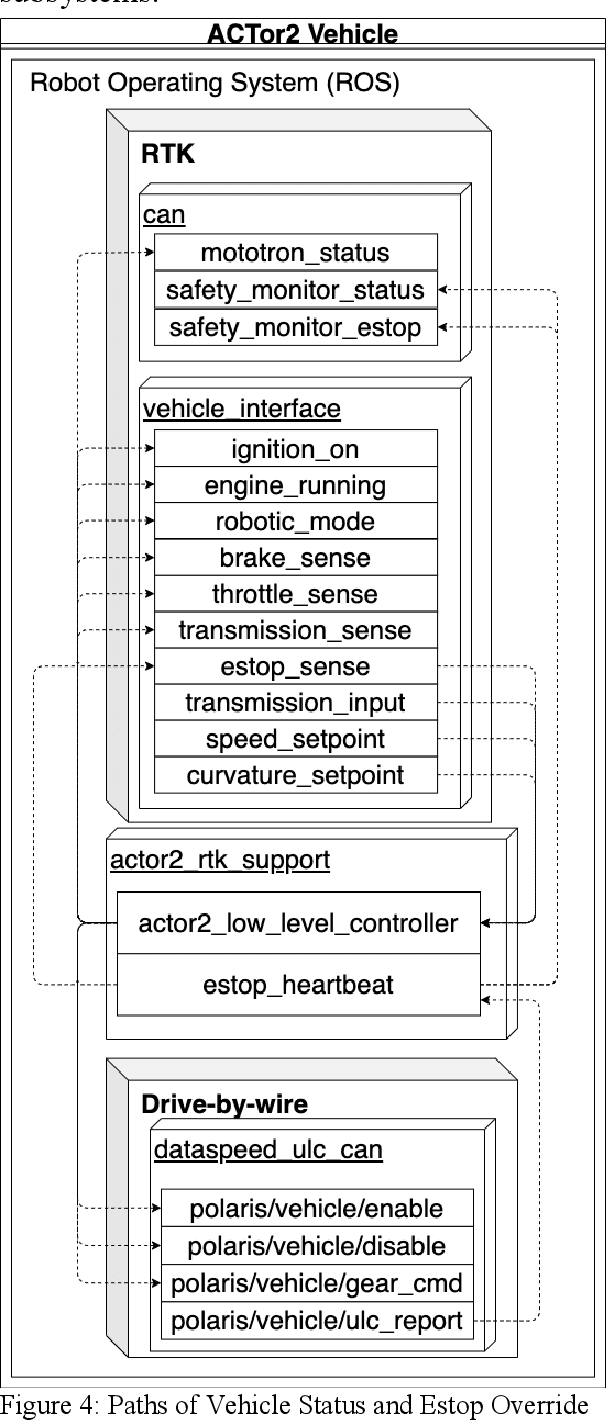
We were able to complete the full integration of the Robotic Technology Kernel (RTK) into an electric vehicle by-wire system using lidar and GPS sensors. The solution included a mobile application to interface with the RTK-enabled autonomous vehicle. Altogether the system was designed to be modular, using the concepts of message-based software design that is built into the Robot Operating System (ROS), which is at the foundation of RTK. The team worked incrementally to develop working software to demonstrate each milestone on the path to successfully completing the RTK integration for the development of an application called the Vehicle Summoning System (VSS).
Via