 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeI Can Hear You Coming: RF Sensing for Uncooperative Satellite Evasion
Apr 04, 2025Uncooperative satellite engagements with nation-state actors prompts the need for enhanced maneuverability and agility on-orbit. However, robust, autonomous and rapid adversary avoidance capabilities for the space environment is seldom studied. Further, the capability constrained nature of many space vehicles does not afford robust space situational awareness capabilities that can inform maneuvers. We present a "Cat & Mouse" system for training optimal adversary avoidance algorithms using Reinforcement Learning (RL). We propose the novel approach of utilizing intercepted radio frequency communication and dynamic spacecraft state as multi-modal input that could inform paths for a mouse to outmaneuver the cat satellite. Given the current ubiquitous use of RF communications, our proposed system can be applicable to a diverse array of satellites. In addition to providing a comprehensive framework for an RL architecture capable of training performant and adaptive adversary avoidance policies, we also explore several optimization based methods for adversarial avoidance on real-world data obtained from the Space Surveillance Network (SSN) to analyze the benefits and limitations of different avoidance methods.
Adaptive Detection of on-Orbit Jamming for Securing GEO Satellite Links
Nov 25, 2024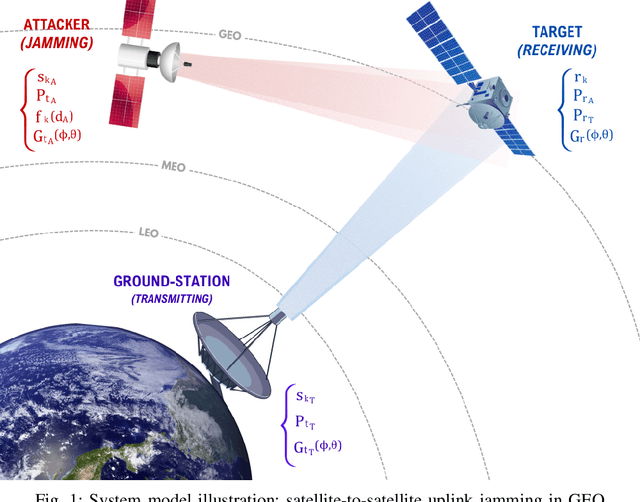
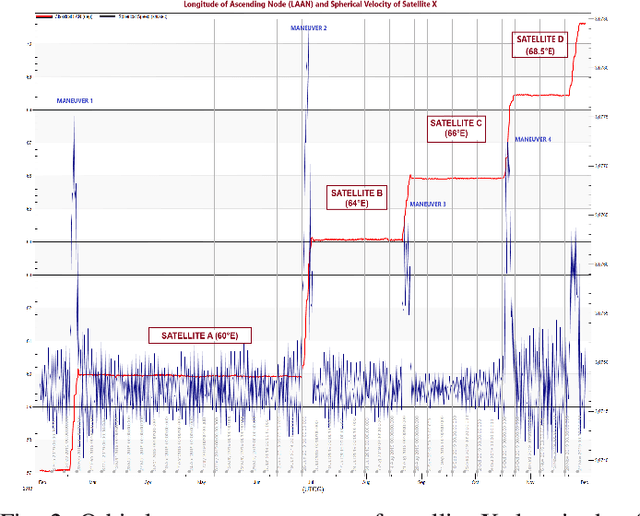
This paper introduces a scenario where a maneuverable satellite in geostationary orbit (GEO) conducts on-orbit attacks, targeting communication between a GEO satellite and a ground station, with the ability to switch between stationary and time-variant jamming modes. We propose a machine learning-based detection approach, employing the random forest algorithm with principal component analysis (PCA) to enhance detection accuracy in the stationary model. At the same time, an adaptive threshold-based technique is implemented for the time-variant model to detect dynamic jamming events effectively. Our methodology emphasizes the need for the use of orbital dynamics in integrating physical constraints from satellite dynamics to improve model robustness and detection accuracy. Simulation results highlight the effectiveness of PCA in enhancing the performance of the stationary model, while the adaptive thresholding method achieves high accuracy in detecting jamming in the time-variant scenario. This approach provides a robust solution for mitigating the evolving threats to satellite communication in GEO environments.
Securing Satellite Link Segment: A Secure-by-Component Design
Nov 19, 2024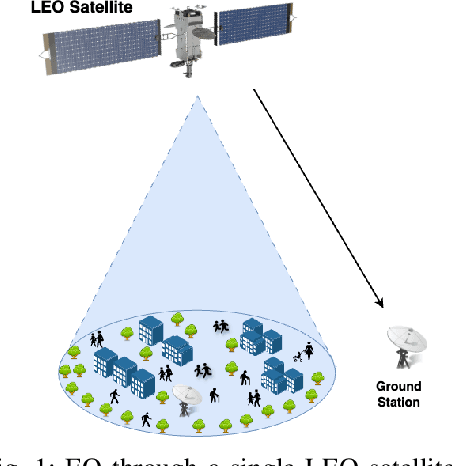
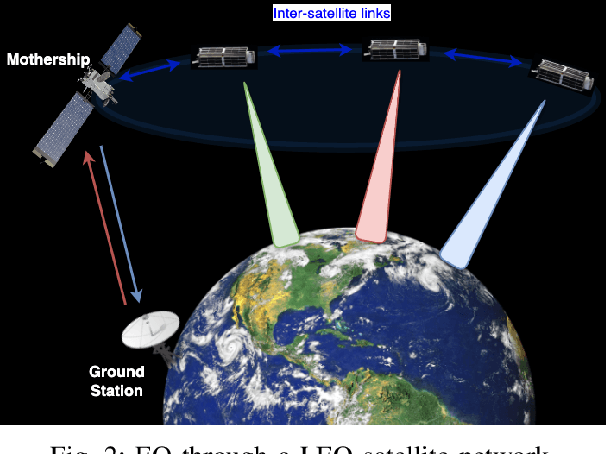

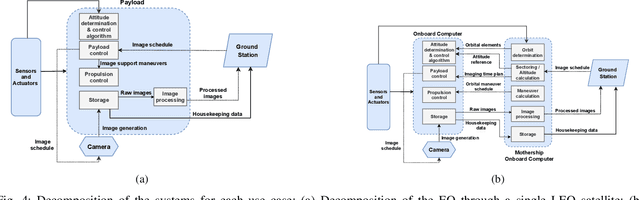
The rapid evolution of communication technologies, compounded by recent geopolitical events such as the Viasat cyberattack in February 2022, has highlighted the urgent need for fast and reliable satellite missions for military and civil security operations. Consequently, this paper examines two Earth observation (EO) missions: one utilizing a single low Earth orbit (LEO) satellite and another through a network of LEO satellites, employing a secure-by-component design strategy. This approach begins by defining the scope of technical security engineering, decomposing the system into components and data flows, and enumerating attack surfaces. Then it proceeds by identifying threats to low-level components, applying secure-by-design principles, redesigning components into secure blocks in alignment with the Space Attack Research & Tactic Analysis (SPARTA) framework, and crafting shall statements to refactor the system design, with a particular focus on improving the security of the link segment.
Cat-and-Mouse Satellite Dynamics: Divergent Adversarial Reinforcement Learning for Contested Multi-Agent Space Operations
Sep 26, 2024As space becomes increasingly crowded and contested, robust autonomous capabilities for multi-agent environments are gaining critical importance. Current autonomous systems in space primarily rely on optimization-based path planning or long-range orbital maneuvers, which have not yet proven effective in adversarial scenarios where one satellite is actively pursuing another. We introduce Divergent Adversarial Reinforcement Learning (DARL), a two-stage Multi-Agent Reinforcement Learning (MARL) approach designed to train autonomous evasion strategies for satellites engaged with multiple adversarial spacecraft. Our method enhances exploration during training by promoting diverse adversarial strategies, leading to more robust and adaptable evader models. We validate DARL through a cat-and-mouse satellite scenario, modeled as a partially observable multi-agent capture the flag game where two adversarial `cat' spacecraft pursue a single `mouse' evader. DARL's performance is compared against several benchmarks, including an optimization-based satellite path planner, demonstrating its ability to produce highly robust models for adversarial multi-agent space environments.
Adversarial Machine Learning Threats to Spacecraft
May 14, 2024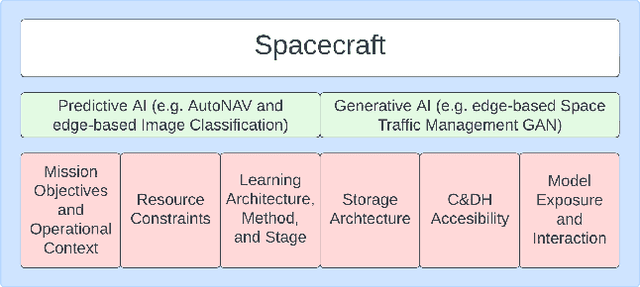
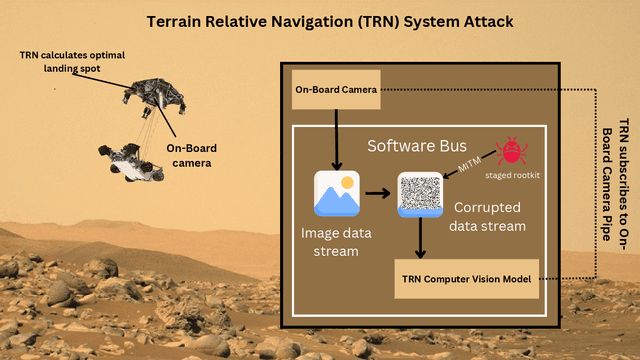
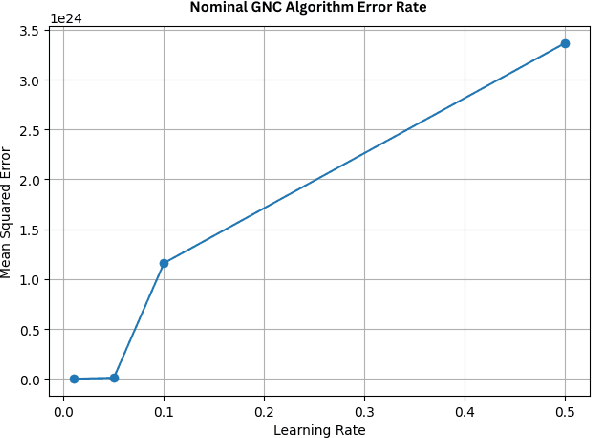
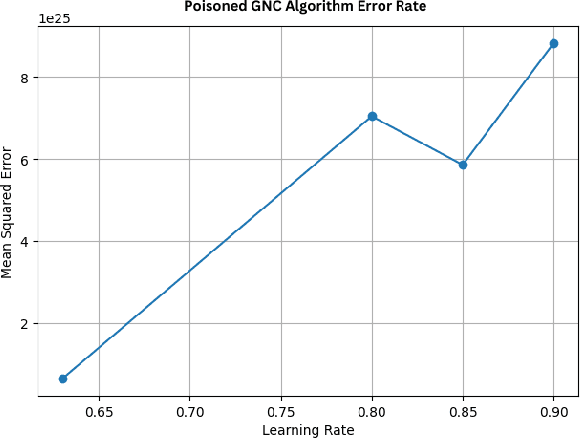
Spacecraft are among the earliest autonomous systems. Their ability to function without a human in the loop have afforded some of humanity's grandest achievements. As reliance on autonomy grows, space vehicles will become increasingly vulnerable to attacks designed to disrupt autonomous processes-especially probabilistic ones based on machine learning. This paper aims to elucidate and demonstrate the threats that adversarial machine learning (AML) capabilities pose to spacecraft. First, an AML threat taxonomy for spacecraft is introduced. Next, we demonstrate the execution of AML attacks against spacecraft through experimental simulations using NASA's Core Flight System (cFS) and NASA's On-board Artificial Intelligence Research (OnAIR) Platform. Our findings highlight the imperative for incorporating AML-focused security measures in spacecraft that engage autonomy.
Cyberphysical Sequencing for Distributed Asset Management with Broad Traceability
Dec 01, 2021
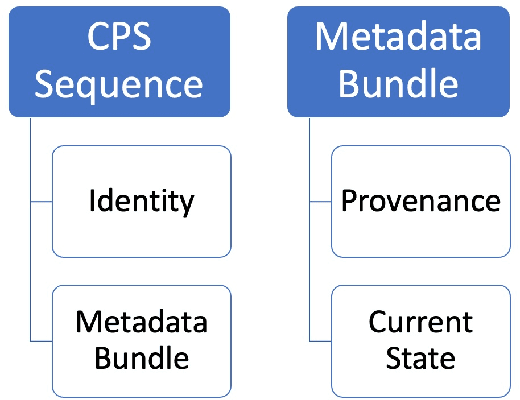
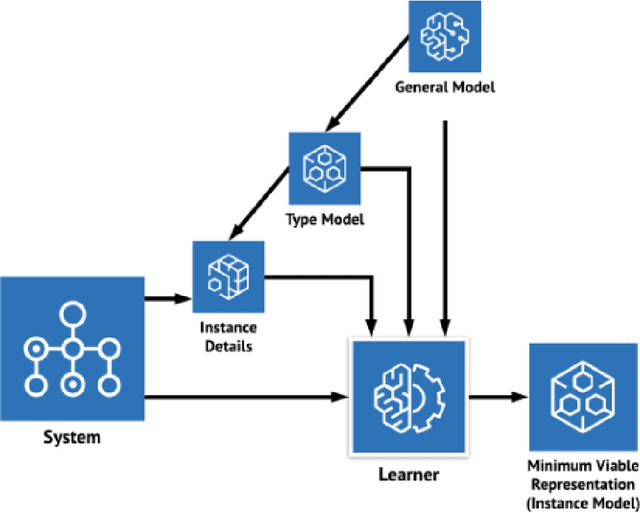
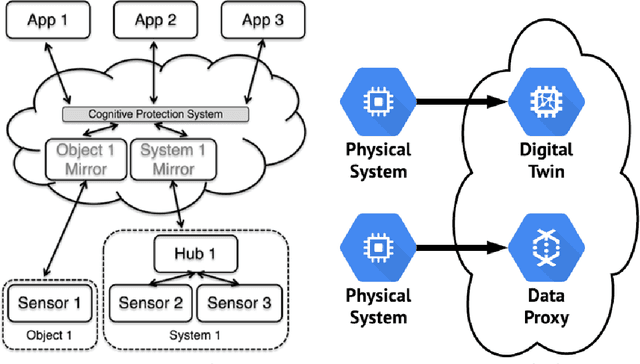
Cyber-Physical systems (CPS) have complex lifecycles involving multiple stakeholders, and the transparency of both hardware and software components' supply chain is opaque at best. This raises concerns for stakeholders who may not trust that what they receive is what was requested. There is an opportunity to build a cyberphysical titling process offering universal traceability and the ability to differentiate systems based on provenance. Today, RFID tags and barcodes address some of these needs, though they are easily manipulated due to non-linkage with an object or system's intrinsic characteristics. We propose cyberphysical sequencing as a low-cost, light-weight and pervasive means of adding track-and-trace capabilities to any asset that ties a system's physical identity to a unique and invariant digital identifier. CPS sequencing offers benefits similar Digital Twins' for identifying and managing the provenance and identity of an asset throughout its life with far fewer computational and other resources.