 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntracranial Error Detection via Deep Learning
Nov 02, 2018


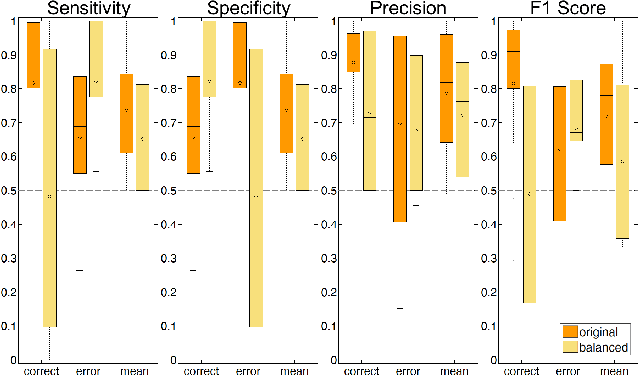
Deep learning techniques have revolutionized the field of machine learning and were recently successfully applied to various classification problems in noninvasive electroencephalography (EEG). However, these methods were so far only rarely evaluated for use in intracranial EEG. We employed convolutional neural networks (CNNs) to classify and characterize the error-related brain response as measured in 24 intracranial EEG recordings. Decoding accuracies of CNNs were significantly higher than those of a regularized linear discriminant analysis. Using time-resolved deep decoding, it was possible to classify errors in various regions in the human brain, and further to decode errors over 200 ms before the actual erroneous button press, e.g., in the precentral gyrus. Moreover, deeper networks performed better than shallower networks in distinguishing correct from error trials in all-channel decoding. In single recordings, up to 100 % decoding accuracy was achieved. Visualization of the networks' learned features indicated that multivariate decoding on an ensemble of channels yields related, albeit non-redundant information compared to single-channel decoding. In summary, here we show the usefulness of deep learning for both intracranial error decoding and mapping of the spatio-temporal structure of the human error processing network.
A large-scale evaluation framework for EEG deep learning architectures
Jul 25, 2018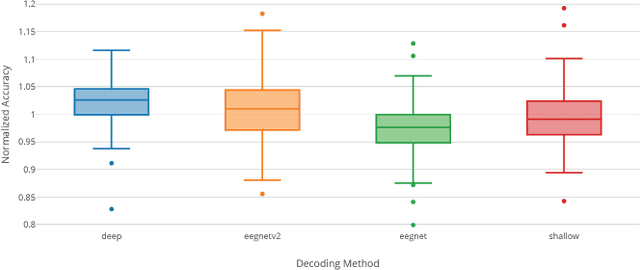
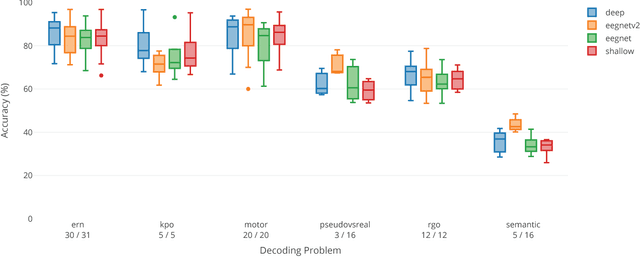
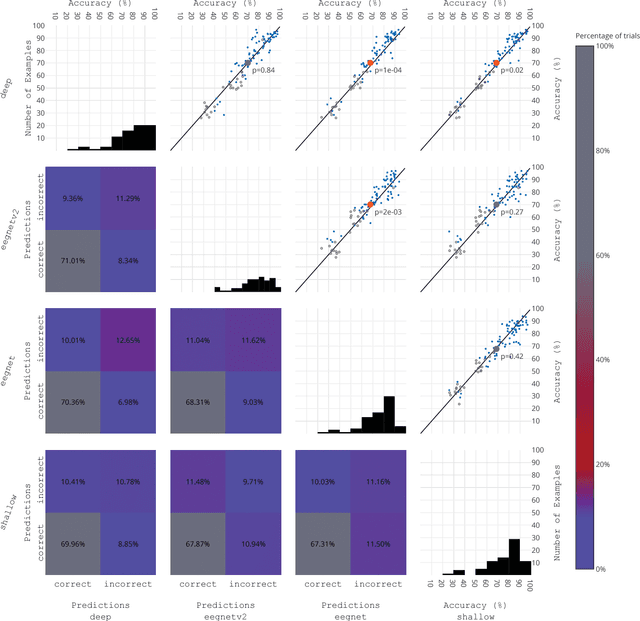
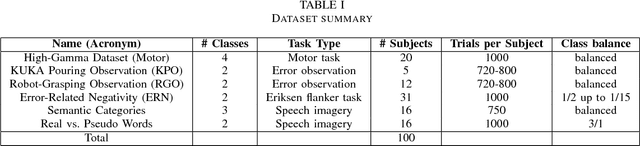
EEG is the most common signal source for noninvasive BCI applications. For such applications, the EEG signal needs to be decoded and translated into appropriate actions. A recently emerging EEG decoding approach is deep learning with Convolutional or Recurrent Neural Networks (CNNs, RNNs) with many different architectures already published. Here we present a novel framework for the large-scale evaluation of different deep-learning architectures on different EEG datasets. This framework comprises (i) a collection of EEG datasets currently including 100 examples (recording sessions) from six different classification problems, (ii) a collection of different EEG decoding algorithms, and (iii) a wrapper linking the decoders to the data as well as handling structured documentation of all settings and (hyper-) parameters and statistics, designed to ensure transparency and reproducibility. As an applications example we used our framework by comparing three publicly available CNN architectures: the Braindecode Deep4 ConvNet, Braindecode Shallow ConvNet, and two versions of EEGNet. We also show how our framework can be used to study similarities and differences in the performance of different decoding methods across tasks. We argue that the deep learning EEG framework as described here could help to tap the full potential of deep learning for BCI applications.
The signature of robot action success in EEG signals of a human observer: Decoding and visualization using deep convolutional neural networks
Nov 16, 2017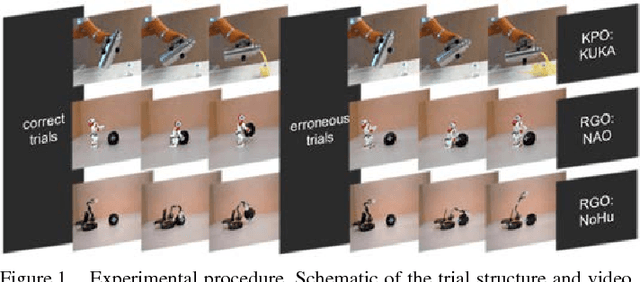
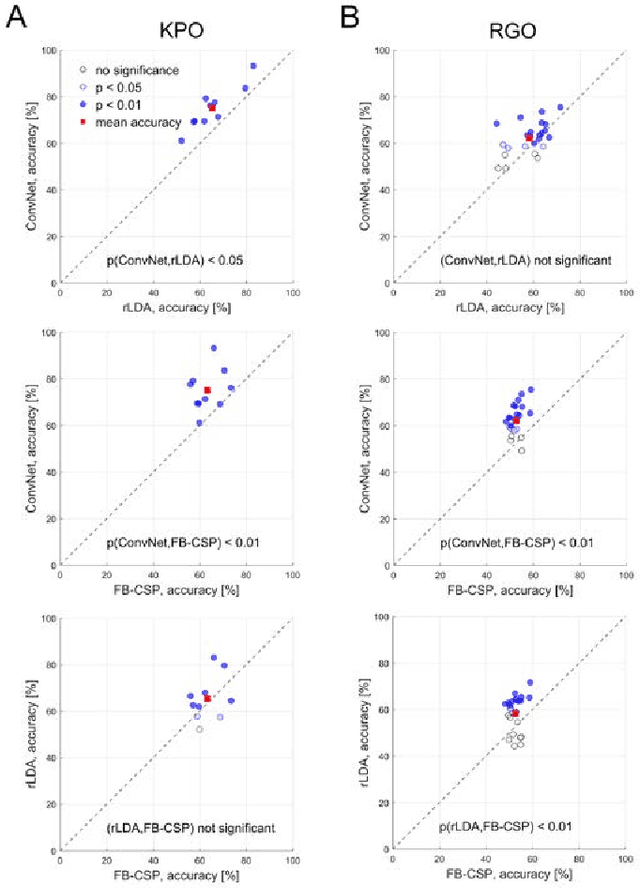
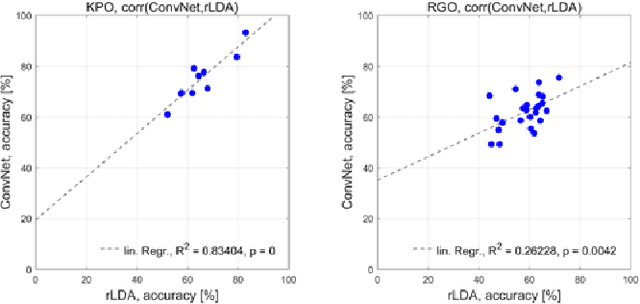
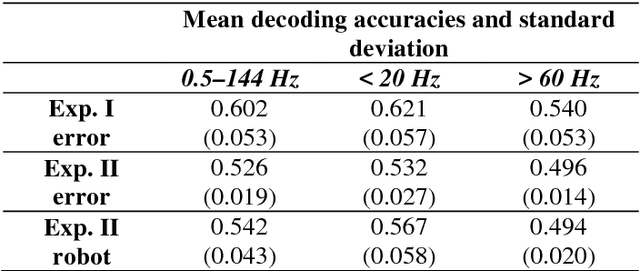
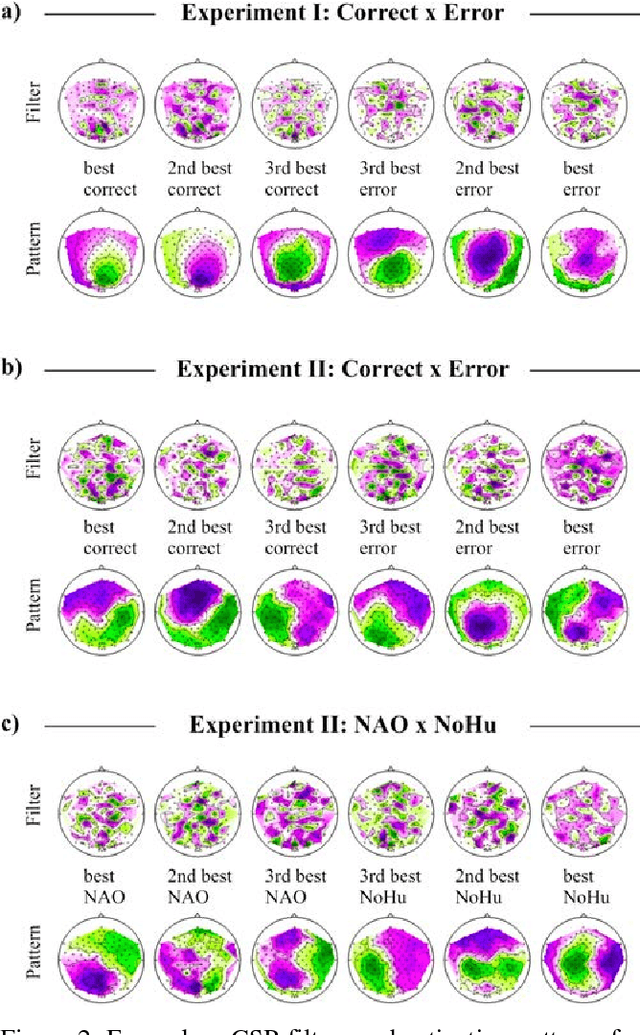
The importance of robotic assistive devices grows in our work and everyday life. Cooperative scenarios involving both robots and humans require safe human-robot interaction. One important aspect here is the management of robot errors, including fast and accurate online robot-error detection and correction. Analysis of brain signals from a human interacting with a robot may help identifying robot errors, but accuracies of such analyses have still substantial space for improvement. In this paper we evaluate whether a novel framework based on deep convolutional neural networks (deep ConvNets) could improve the accuracy of decoding robot errors from the EEG of a human observer, both during an object grasping and a pouring task. We show that deep ConvNets reached significantly higher accuracies than both regularized Linear Discriminant Analysis (rLDA) and filter bank common spatial patterns (FB-CSP) combined with rLDA, both widely used EEG classifiers. Deep ConvNets reached mean accuracies of 75% +/- 9 %, rLDA 65% +/- 10% and FB-CSP + rLDA 63% +/- 6% for decoding of erroneous vs. correct trials. Visualization of the time-domain EEG features learned by the ConvNets to decode errors revealed spatiotemporal patterns that reflected differences between the two experimental paradigms. Across subjects, ConvNet decoding accuracies were significantly correlated with those obtained with rLDA, but not CSP, indicating that in the present context ConvNets behaved more 'rLDA-like' (but consistently better), while in a previous decoding study with another task but the same ConvNet architecture, it was found to behave more 'CSP-like'. Our findings thus provide further support for the assumption that deep ConvNets are a versatile addition to the existing toolbox of EEG decoding techniques, and we discuss steps how ConvNet EEG decoding performance could be further optimized.
Brain Responses During Robot-Error Observation
Aug 16, 2017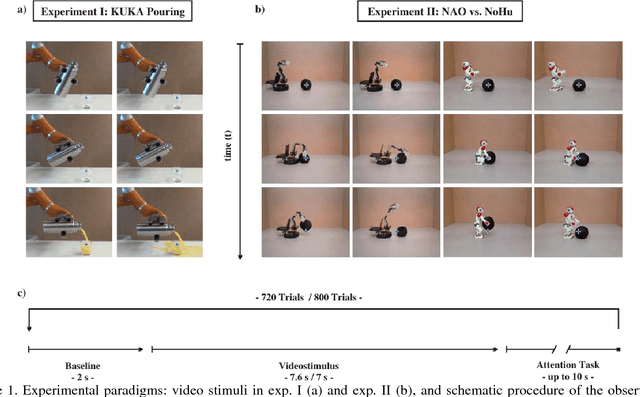
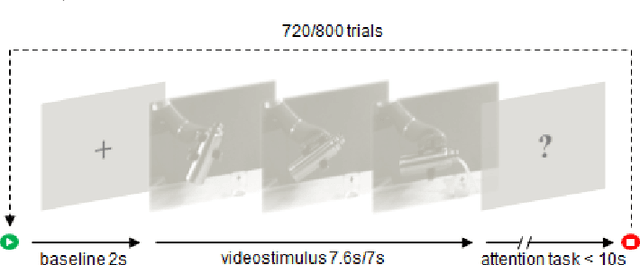
Brain-controlled robots are a promising new type of assistive device for severely impaired persons. Little is however known about how to optimize the interaction of humans and brain-controlled robots. Information about the human's perceived correctness of robot performance might provide a useful teaching signal for adaptive control algorithms and thus help enhancing robot control. Here, we studied whether watching robots perform erroneous vs. correct action elicits differential brain responses that can be decoded from single trials of electroencephalographic (EEG) recordings, and whether brain activity during human-robot interaction is modulated by the robot's visual similarity to a human. To address these topics, we designed two experiments. In experiment I, participants watched a robot arm pour liquid into a cup. The robot performed the action either erroneously or correctly, i.e. it either spilled some liquid or not. In experiment II, participants observed two different types of robots, humanoid and non-humanoid, grabbing a ball. The robots either managed to grab the ball or not. We recorded high-resolution EEG during the observation tasks in both experiments to train a Filter Bank Common Spatial Pattern (FBCSP) pipeline on the multivariate EEG signal and decode for the correctness of the observed action, and for the type of the observed robot. Our findings show that it was possible to decode both correctness and robot type for the majority of participants significantly, although often just slightly, above chance level. Our findings suggest that non-invasive recordings of brain responses elicited when observing robots indeed contain decodable information about the correctness of the robot's action and the type of observed robot.