 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACLS: Adaptive and Conditional Label Smoothing for Network Calibration
Aug 24, 2023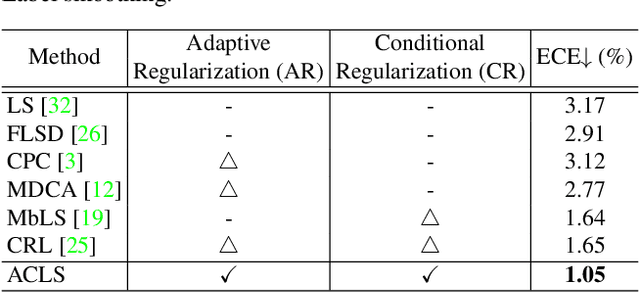
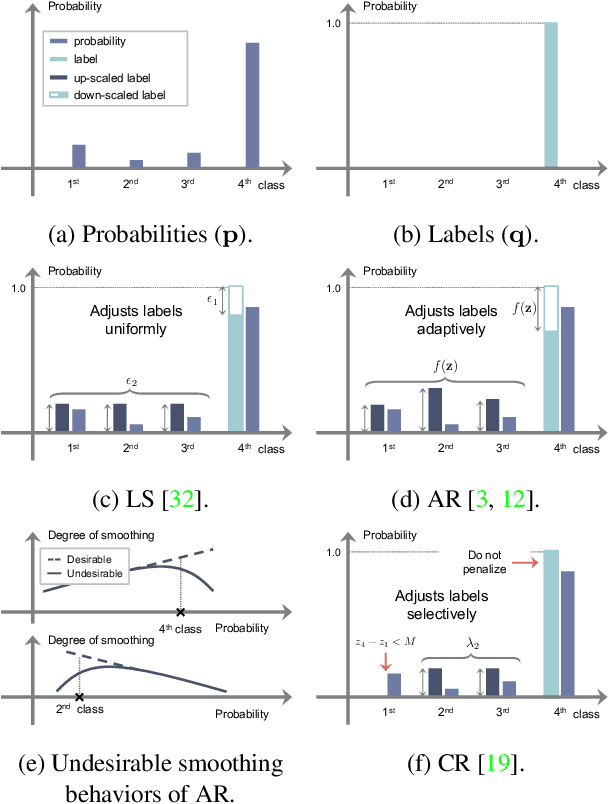
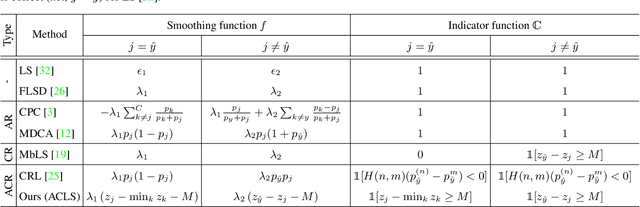
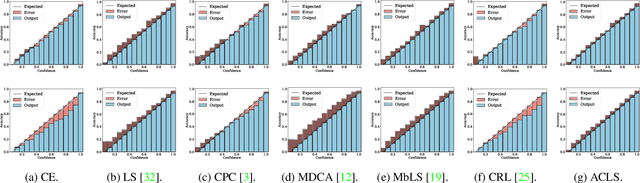
We address the problem of network calibration adjusting miscalibrated confidences of deep neural networks. Many approaches to network calibration adopt a regularization-based method that exploits a regularization term to smooth the miscalibrated confidences. Although these approaches have shown the effectiveness on calibrating the networks, there is still a lack of understanding on the underlying principles of regularization in terms of network calibration. We present in this paper an in-depth analysis of existing regularization-based methods, providing a better understanding on how they affect to network calibration. Specifically, we have observed that 1) the regularization-based methods can be interpreted as variants of label smoothing, and 2) they do not always behave desirably. Based on the analysis, we introduce a novel loss function, dubbed ACLS, that unifies the merits of existing regularization methods, while avoiding the limitations. We show extensive experimental results for image classification and semantic segmentation on standard benchmarks, including CIFAR10, Tiny-ImageNet, ImageNet, and PASCAL VOC, demonstrating the effectiveness of our loss function.
RankMixup: Ranking-Based Mixup Training for Network Calibration
Aug 23, 2023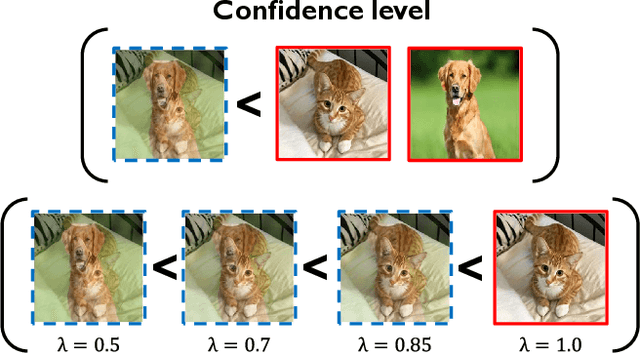
Network calibration aims to accurately estimate the level of confidences, which is particularly important for employing deep neural networks in real-world systems. Recent approaches leverage mixup to calibrate the network's predictions during training. However, they do not consider the problem that mixtures of labels in mixup may not accurately represent the actual distribution of augmented samples. In this paper, we present RankMixup, a novel mixup-based framework alleviating the problem of the mixture of labels for network calibration. To this end, we propose to use an ordinal ranking relationship between raw and mixup-augmented samples as an alternative supervisory signal to the label mixtures for network calibration. We hypothesize that the network should estimate a higher level of confidence for the raw samples than the augmented ones (Fig.1). To implement this idea, we introduce a mixup-based ranking loss (MRL) that encourages lower confidences for augmented samples compared to raw ones, maintaining the ranking relationship. We also propose to leverage the ranking relationship among multiple mixup-augmented samples to further improve the calibration capability. Augmented samples with larger mixing coefficients are expected to have higher confidences and vice versa (Fig.1). That is, the order of confidences should be aligned with that of mixing coefficients. To this end, we introduce a novel loss, M-NDCG, in order to reduce the number of misaligned pairs of the coefficients and confidences. Extensive experimental results on standard benchmarks for network calibration demonstrate the effectiveness of RankMixup.
HVPR: Hybrid Voxel-Point Representation for Single-stage 3D Object Detection
Apr 02, 2021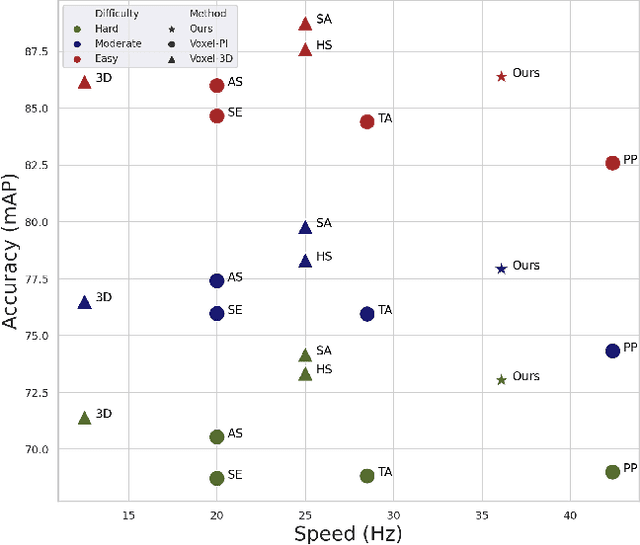
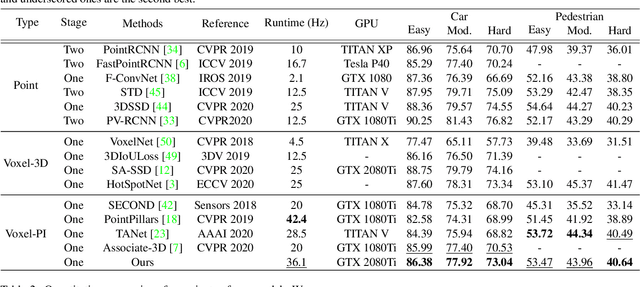
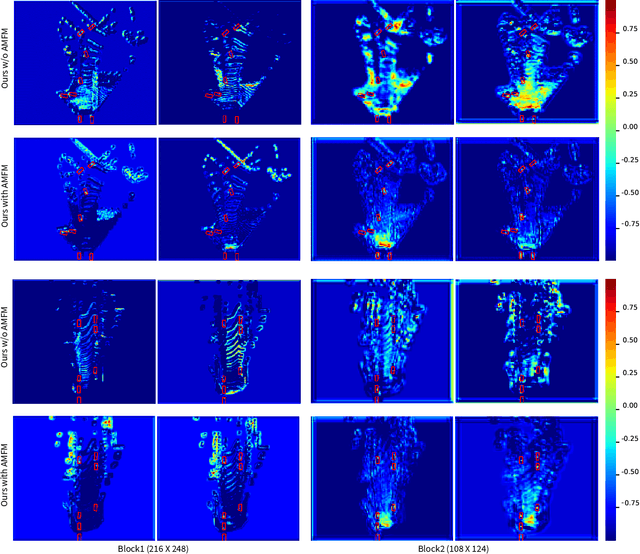
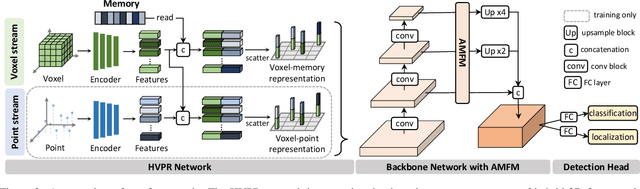
We address the problem of 3D object detection, that is, estimating 3D object bounding boxes from point clouds. 3D object detection methods exploit either voxel-based or point-based features to represent 3D objects in a scene. Voxel-based features are efficient to extract, while they fail to preserve fine-grained 3D structures of objects. Point-based features, on the other hand, represent the 3D structures more accurately, but extracting these features is computationally expensive. We introduce in this paper a novel single-stage 3D detection method having the merit of both voxel-based and point-based features. To this end, we propose a new convolutional neural network (CNN) architecture, dubbed HVPR, that integrates both features into a single 3D representation effectively and efficiently. Specifically, we augment the point-based features with a memory module to reduce the computational cost. We then aggregate the features in the memory, semantically similar to each voxel-based one, to obtain a hybrid 3D representation in a form of a pseudo image, allowing to localize 3D objects in a single stage efficiently. We also propose an Attentive Multi-scale Feature Module (AMFM) that extracts scale-aware features considering the sparse and irregular patterns of point clouds. Experimental results on the KITTI dataset demonstrate the effectiveness and efficiency of our approach, achieving a better compromise in terms of speed and accuracy.
Learning Memory-guided Normality for Anomaly Detection
Mar 30, 2020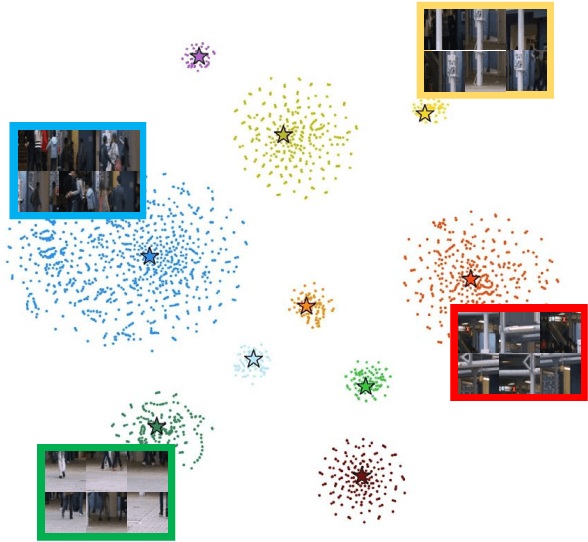
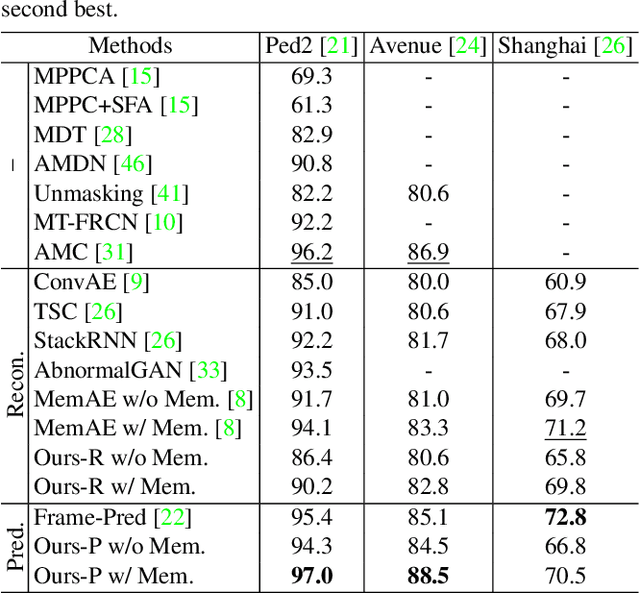


We address the problem of anomaly detection, that is, detecting anomalous events in a video sequence. Anomaly detection methods based on convolutional neural networks (CNNs) typically leverage proxy tasks, such as reconstructing input video frames, to learn models describing normality without seeing anomalous samples at training time, and quantify the extent of abnormalities using the reconstruction error at test time. The main drawbacks of these approaches are that they do not consider the diversity of normal patterns explicitly, and the powerful representation capacity of CNNs allows to reconstruct abnormal video frames. To address this problem, we present an unsupervised learning approach to anomaly detection that considers the diversity of normal patterns explicitly, while lessening the representation capacity of CNNs. To this end, we propose to use a memory module with a new update scheme where items in the memory record prototypical patterns of normal data. We also present novel feature compactness and separateness losses to train the memory, boosting the discriminative power of both memory items and deeply learned features from normal data. Experimental results on standard benchmarks demonstrate the effectiveness and efficiency of our approach, which outperforms the state of the art.