 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEL3DD: Extended Latent 3D Diffusion for Language Conditioned Multitask Manipulation
Nov 17, 2025


Acting in human environments is a crucial capability for general-purpose robots, necessitating a robust understanding of natural language and its application to physical tasks. This paper seeks to harness the capabilities of diffusion models within a visuomotor policy framework that merges visual and textual inputs to generate precise robotic trajectories. By employing reference demonstrations during training, the model learns to execute manipulation tasks specified through textual commands within the robot's immediate environment. The proposed research aims to extend an existing model by leveraging improved embeddings, and adapting techniques from diffusion models for image generation. We evaluate our methods on the CALVIN dataset, proving enhanced performance on various manipulation tasks and an increased long-horizon success rate when multiple tasks are executed in sequence. Our approach reinforces the usefulness of diffusion models and contributes towards general multitask manipulation.
RoboCup@Home 2024 OPL Winner NimbRo: Anthropomorphic Service Robots using Foundation Models for Perception and Planning
Dec 19, 2024
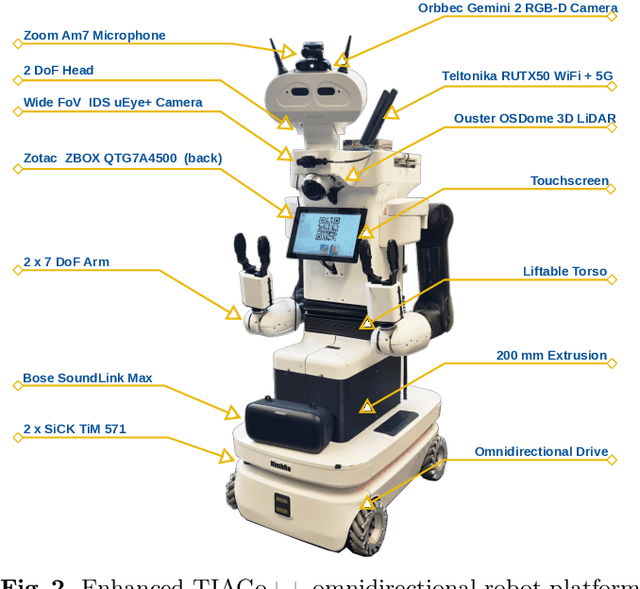


We present the approaches and contributions of the winning team NimbRo@Home at the RoboCup@Home 2024 competition in the Open Platform League held in Eindhoven, NL. Further, we describe our hardware setup and give an overview of the results for the task stages and the final demonstration. For this year's competition, we put a special emphasis on open-vocabulary object segmentation and grasping approaches that overcome the labeling overhead of supervised vision approaches, commonly used in RoboCup@Home. We successfully demonstrated that we can segment and grasp non-labeled objects by text descriptions. Further, we extensively employed LLMs for natural language understanding and task planning. Throughout the competition, our approaches showed robustness and generalization capabilities. A video of our performance can be found online.
A Comparison of Prompt Engineering Techniques for Task Planning and Execution in Service Robotics
Oct 30, 2024



Recent advances in LLM have been instrumental in autonomous robot control and human-robot interaction by leveraging their vast general knowledge and capabilities to understand and reason across a wide range of tasks and scenarios. Previous works have investigated various prompt engineering techniques for improving the performance of \glspl{LLM} to accomplish tasks, while others have proposed methods that utilize LLMs to plan and execute tasks based on the available functionalities of a given robot platform. In this work, we consider both lines of research by comparing prompt engineering techniques and combinations thereof within the application of high-level task planning and execution in service robotics. We define a diverse set of tasks and a simple set of functionalities in simulation, and measure task completion accuracy and execution time for several state-of-the-art models.