 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring the Graph Structure of Images for Graph Neural Networks
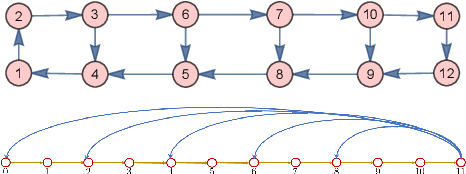
Sep 04, 2025Image datasets such as MNIST are a key benchmark for testing Graph Neural Network (GNN) architectures. The images are traditionally represented as a grid graph with each node representing a pixel and edges connecting neighboring pixels (vertically and horizontally). The graph signal is the values (intensities) of each pixel in the image. The graphs are commonly used as input to graph neural networks (e.g., Graph Convolutional Neural Networks (Graph CNNs) [1, 2], Graph Attention Networks (GAT) [3], GatedGCN [4]) to classify the images. In this work, we improve the accuracy of downstream graph neural network tasks by finding alternative graphs to the grid graph and superpixel methods to represent the dataset images, following the approach in [5, 6]. We find row correlation, column correlation, and product graphs for each image in MNIST and Fashion-MNIST using correlations between the pixel values building on the method in [5, 6]. Experiments show that using these different graph representations and features as input into downstream GNN models improves the accuracy over using the traditional grid graph and superpixel methods in the literature.
GSP = DSP + Boundary Conditions -- The Graph Signal Processing Companion Model
Mar 04, 2023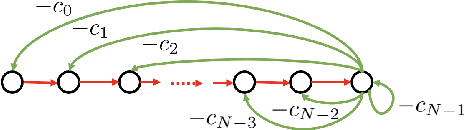
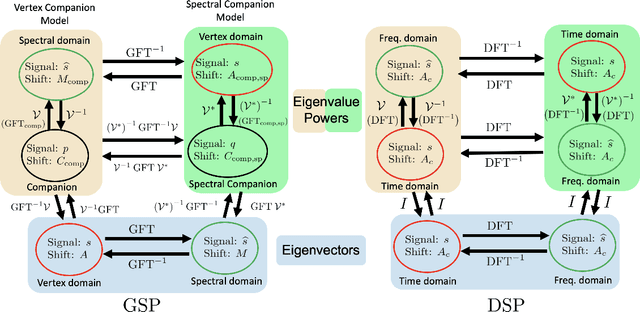
The paper presents the graph signal processing (GSP) companion model that naturally replicates the basic tenets of classical signal processing (DSP) for GSP. The companion model shows that GSP can be made equivalent to DSP 'plus' appropriate boundary conditions (bc) - this is shown under broad conditions and holds for arbitrary undirected or directed graphs. This equivalence suggests how to broaden GSP - extend naturally a DSP concept to the GSP companion model and then transfer it back to the common graph vertex and graph Fourier domains. The paper shows that GSP unrolls as two distinct models that coincide in DSP, the companion model based on (Hadamard or pointwise) powers of what we will introduce as the spectral frequency vector $\lambda$, and the traditional graph vertex model, based on the adjacency matrix and its eigenvectors. The paper expands GSP in several directions, including showing that convolution in the graph companion model can be achieved with the FFT and that GSP modulation with appropriate choice of carriers exhibits the DSP translation effect that enables multiplexing by modulation of graph signals.
The Companion Model -- a Canonical Model in Graph Signal Processing
Mar 25, 2022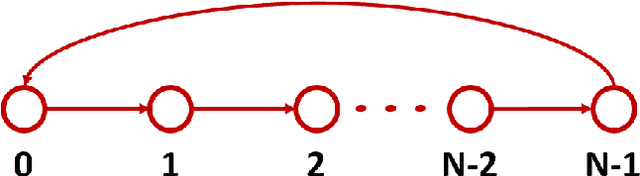
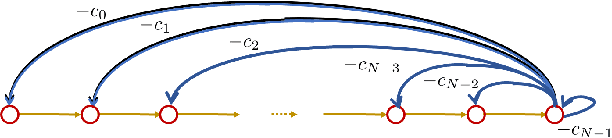

This paper introduces a $\textit{canonical}$ graph signal model defined by a $\textit{canonical}$ graph and a $\textit{canonical}$ shift, the $\textit{companion}$ graph and the $\textit{companion}$ shift. These are canonical because, under standard conditions, we show that any graph signal processing (GSP) model can be transformed into the canonical model. The transform that obtains this is the graph $z$-transform ($\textrm{G$z$T}$) that we introduce. The GSP canonical model comes closest to the discrete signal processing (DSP) time signal models: the structure of the companion shift decomposes into a line shift and a signal continuation just like the DSP shift and the GSP canonical graph is a directed line graph with a terminal condition reflecting the signal continuation condition. We further show that, surprisingly, in the canonical model, convolution of graph signals is fast convolution by the DSP FFT.
Graph Signal Processing: A Signal Representation Approach to Convolution and Sampling
Mar 26, 2021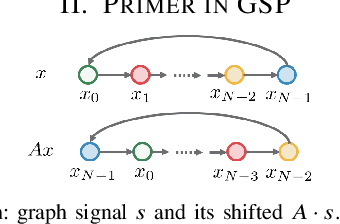
The paper presents sampling in GSP as 1) linear operations (change of bases) between signal representations and 2) downsampling as linear shift invariant filtering and reconstruction (interpolation) as filtering, both in the spectral domain. To achieve this, it considers a spectral shift $M$ that leads to a spectral graph signal processing theory, $\text{GSP}_{\textrm{sp}}$, dual to GSP but that starts from the spectral domain and $M$. The paper introduces alternative signal representations, convolution of graph signals for these alternative representations, presenting a $\textit{fast}$ GSP convolution that uses the DSP FFT algorithm, and sampling as solutions of algebraic linear systems of equations.
Edge Entropy as an Indicator of the Effectiveness of GNNs over CNNs for Node Classification
Dec 16, 2020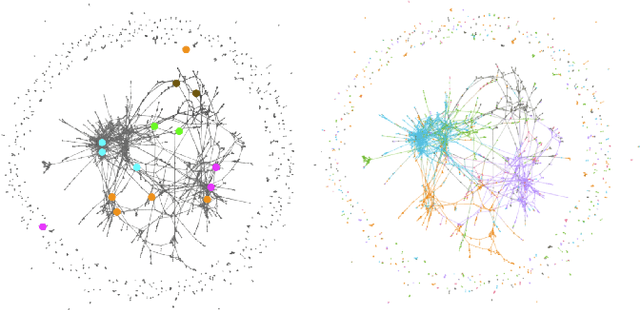
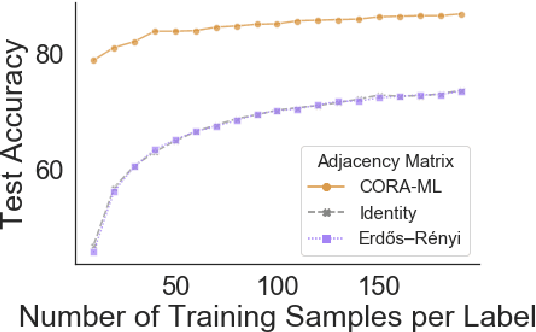
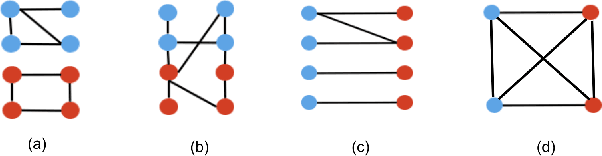
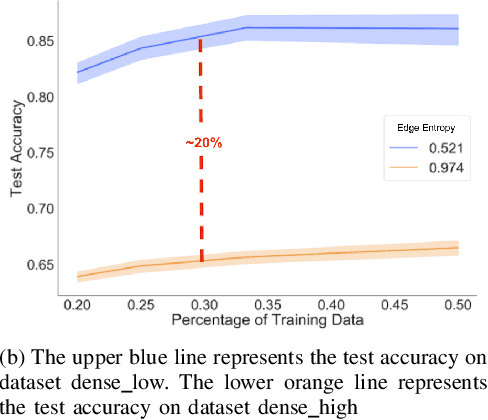
Graph neural networks (GNNs) extend convolutional neural networks (CNNs) to graph-based data. A question that arises is how much performance improvement does the underlying graph structure in the GNN provide over the CNN (that ignores this graph structure). To address this question, we introduce edge entropy and evaluate how good an indicator it is for possible performance improvement of GNNs over CNNs. Our results on node classification with synthetic and real datasets show that lower values of edge entropy predict larger expected performance gains of GNNs over CNNs, and, conversely, higher edge entropy leads to expected smaller improvement gains.
Pooling in Graph Convolutional Neural Networks
Apr 07, 2020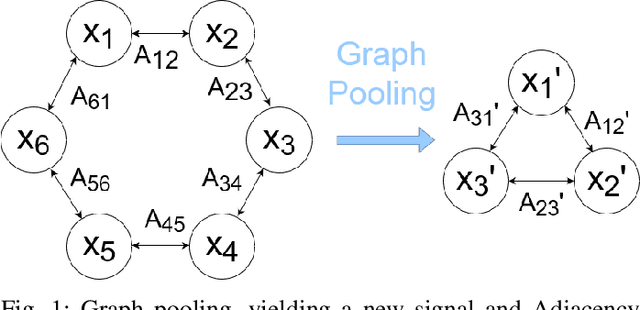
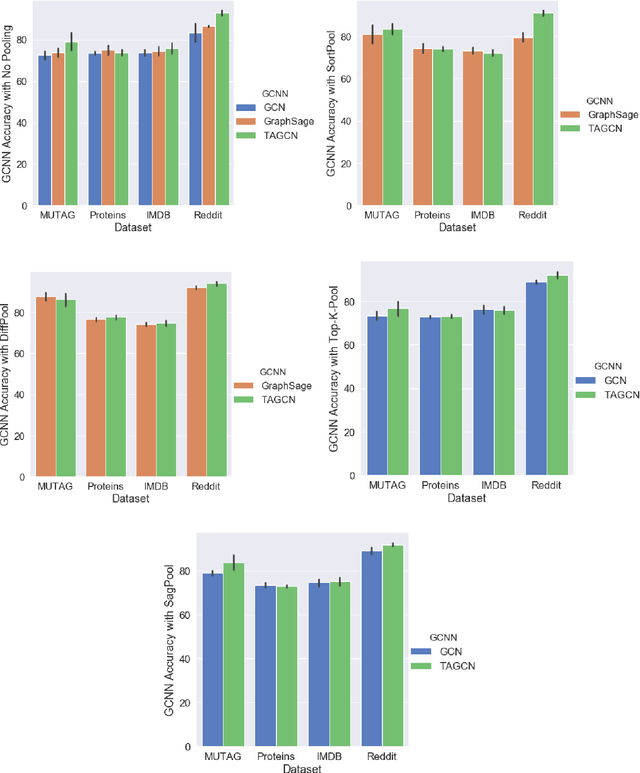
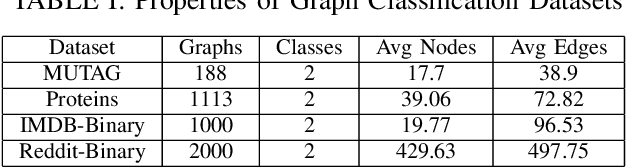
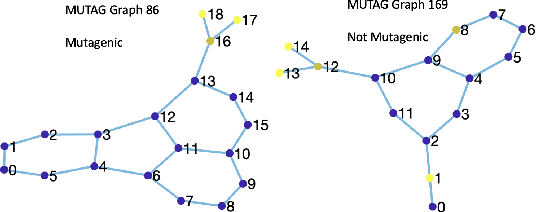
Graph convolutional neural networks (GCNNs) are a powerful extension of deep learning techniques to graph-structured data problems. We empirically evaluate several pooling methods for GCNNs, and combinations of those graph pooling methods with three different architectures: GCN, TAGCN, and GraphSAGE. We confirm that graph pooling, especially DiffPool, improves classification accuracy on popular graph classification datasets and find that, on average, TAGCN achieves comparable or better accuracy than GCN and GraphSAGE, particularly for datasets with larger and sparser graph structures.