 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerceptual Motor Learning with Active Inference Framework for Robust Lateral Control
Mar 05, 2025This paper presents a novel Perceptual Motor Learning (PML) framework integrated with Active Inference (AIF) to enhance lateral control in Highly Automated Vehicles (HAVs). PML, inspired by human motor learning, emphasizes the seamless integration of perception and action, enabling efficient decision-making in dynamic environments. Traditional autonomous driving approaches--including modular pipelines, imitation learning, and reinforcement learning--struggle with adaptability, generalization, and computational efficiency. In contrast, PML with AIF leverages a generative model to minimize prediction error ("surprise") and actively shape vehicle control based on learned perceptual-motor representations. Our approach unifies deep learning with active inference principles, allowing HAVs to perform lane-keeping maneuvers with minimal data and without extensive retraining across different environments. Extensive experiments in the CARLA simulator demonstrate that PML with AIF enhances adaptability without increasing computational overhead while achieving performance comparable to conventional methods. These findings highlight the potential of PML-driven active inference as a robust alternative for real-world autonomous driving applications.
Towards Human-Like Driving: Active Inference in Autonomous Vehicle Control
Jul 10, 2024This paper presents a novel approach to Autonomous Vehicle (AV) control through the application of active inference, a theory derived from neuroscience that conceptualizes the brain as a predictive machine. Traditional autonomous driving systems rely heavily on Modular Pipelines, Imitation Learning, or Reinforcement Learning, each with inherent limitations in adaptability, generalization, and computational efficiency. Active inference addresses these challenges by minimizing prediction error (termed "surprise") through a dynamic model that balances perception and action. Our method integrates active inference with deep learning to manage lateral control in AVs, enabling them to perform lane following maneuvers within a simulated urban environment. We demonstrate that our model, despite its simplicity, effectively learns and generalizes from limited data without extensive retraining, significantly reducing computational demands. The proposed approach not only enhances the adaptability and performance of AVs in dynamic scenarios but also aligns closely with human-like driving behavior, leveraging a generative model to predict and adapt to environmental changes. Results from extensive experiments in the CARLA simulator show promising outcomes, outperforming traditional methods in terms of adaptability and efficiency, thereby advancing the potential of active inference in real-world autonomous driving applications.
Modeling and Simultaneously Removing Bias via Adversarial Neural Networks
Apr 18, 2018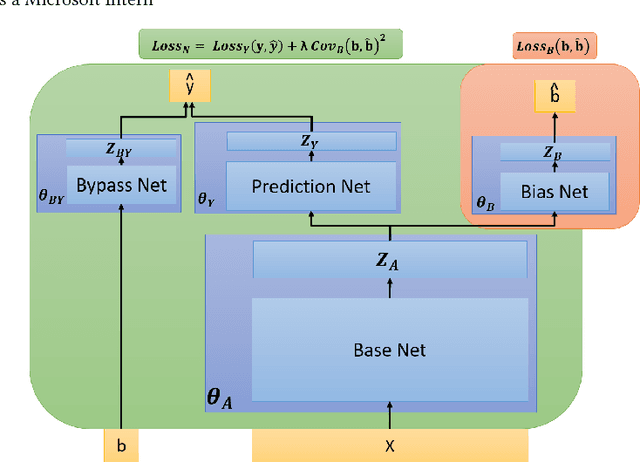
In real world systems, the predictions of deployed Machine Learned models affect the training data available to build subsequent models. This introduces a bias in the training data that needs to be addressed. Existing solutions to this problem attempt to resolve the problem by either casting this in the reinforcement learning framework or by quantifying the bias and re-weighting the loss functions. In this work, we develop a novel Adversarial Neural Network (ANN) model, an alternative approach which creates a representation of the data that is invariant to the bias. We take the Paid Search auction as our working example and ad display position features as the confounding features for this setting. We show the success of this approach empirically on both synthetic data as well as real world paid search auction data from a major search engine.