 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation of Attacker Defender Interaction in a Noisy Security Game
Dec 08, 2022In the cybersecurity setting, defenders are often at the mercy of their detection technologies and subject to the information and experiences that individual analysts have. In order to give defenders an advantage, it is important to understand an attacker's motivation and their likely next best action. As a first step in modeling this behavior, we introduce a security game framework that simulates interplay between attackers and defenders in a noisy environment, focusing on the factors that drive decision making for attackers and defenders in the variants of the game with full knowledge and observability, knowledge of the parameters but no observability of the state (``partial knowledge''), and zero knowledge or observability (``zero knowledge''). We demonstrate the importance of making the right assumptions about attackers, given significant differences in outcomes. Furthermore, there is a measurable trade-off between false-positives and true-positives in terms of attacker outcomes, suggesting that a more false-positive prone environment may be acceptable under conditions where true-positives are also higher.
Evaluation of an Anomaly Detector for Routers using Parameterizable Malware in an IoT Ecosystem
Oct 29, 2021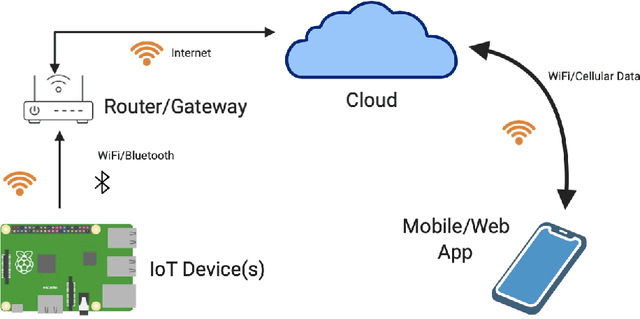
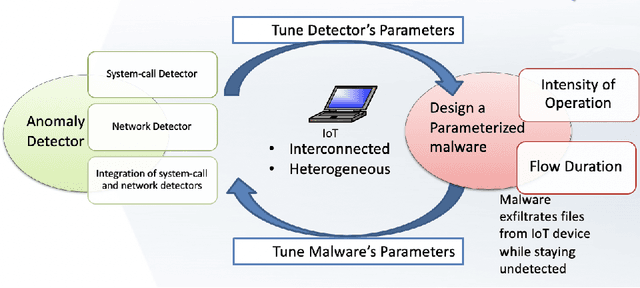
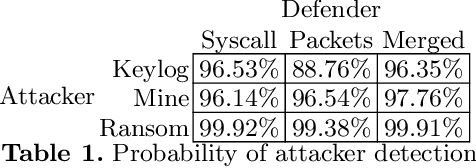
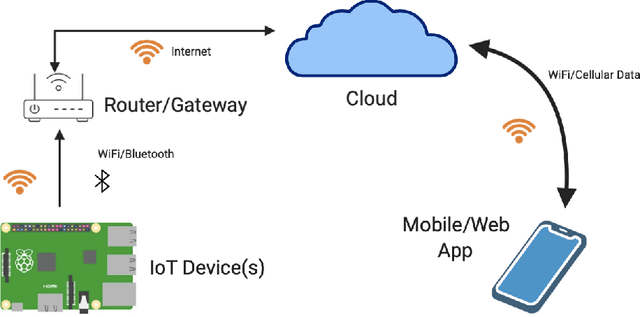
This work explores the evaluation of a machine learning anomaly detector using custom-made parameterizable malware in an Internet of Things (IoT) Ecosystem. It is assumed that the malware has infected, and resides on, the Linux router that serves other devices on the network, as depicted in Figure 1. This IoT Ecosystem was developed as a testbed to evaluate the efficacy of a behavior-based anomaly detector. The malware consists of three types of custom-made malware: ransomware, cryptominer, and keylogger, which all have exfiltration capabilities to the network. The parameterization of the malware gives the malware samples multiple degrees of freedom, specifically relating to the rate and size of data exfiltration. The anomaly detector uses feature sets crafted from system calls and network traffic, and uses a Support Vector Machine (SVM) for behavioral-based anomaly detection. The custom-made malware is used to evaluate the situations where the SVM is effective, as well as the situations where it is not effective.
Evaluating Attacker Risk Behavior in an Internet of Things Ecosystem
Sep 23, 2021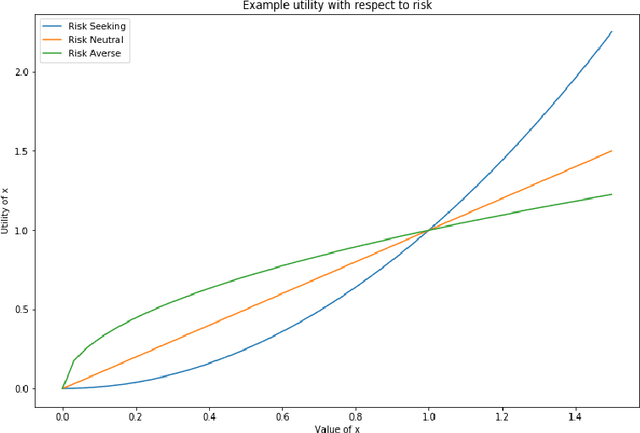
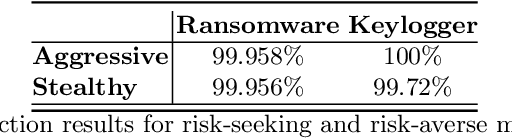
In cybersecurity, attackers range from brash, unsophisticated script kiddies and cybercriminals to stealthy, patient advanced persistent threats. When modeling these attackers, we can observe that they demonstrate different risk-seeking and risk-averse behaviors. This work explores how an attacker's risk seeking or risk averse behavior affects their operations against detection-optimizing defenders in an Internet of Things ecosystem. Using an evaluation framework which uses real, parametrizable malware, we develop a game that is played by a defender against attackers with a suite of malware that is parameterized to be more aggressive and more stealthy. These results are evaluated under a framework of exponential utility according to their willingness to accept risk. We find that against a defender who must choose a single strategy up front, risk-seeking attackers gain more actual utility than risk-averse attackers, particularly in cases where the defender is better equipped than the two attackers anticipate. Additionally, we empirically confirm that high-risk, high-reward scenarios are more beneficial to risk-seeking attackers like cybercriminals, while low-risk, low-reward scenarios are more beneficial to risk-averse attackers like advanced persistent threats.
Real-Time Planning with Multi-Fidelity Models for Agile Flights in Unknown Environments
Oct 02, 2018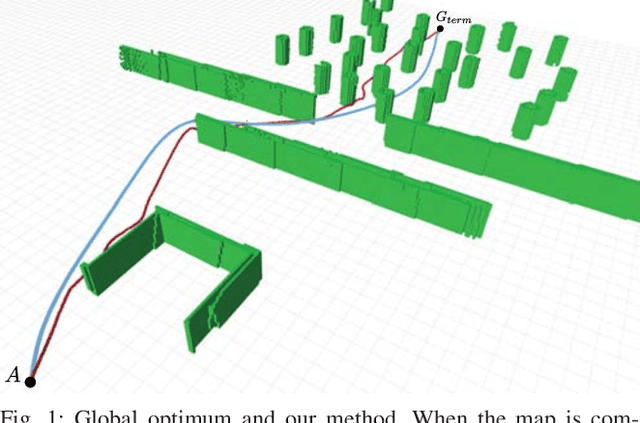


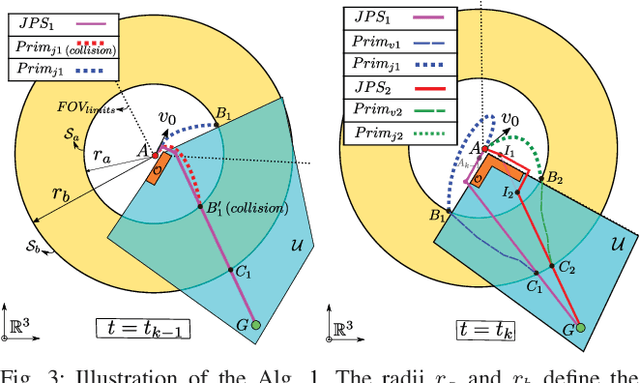
Autonomous navigation through unknown environments is a challenging task that entails real-time localization, perception, planning, and control. UAVs with this capability have begun to emerge in the literature with advances in lightweight sensing and computing. Although the planning methodologies vary from platform to platform, many algorithms adopt a hierarchical planning architecture where a slow, low-fidelity global planner guides a fast, high-fidelity local planner. However, in unknown environments, this approach can lead to erratic or unstable behavior due to the interaction between the global planner, whose solution is changing constantly, and the local planner; a consequence of not capturing higher-order dynamics in the global plan. This work proposes a planning framework in which multi-fidelity models are used to reduce the discrepancy between the local and global planner. Our approach uses high-, medium-, and low-fidelity models to compose a path that captures higher-order dynamics while remaining computationally tractable. In addition, we address the interaction between a fast planner and a slower mapper by considering the sensor data not yet fused into the map during the collision check. This novel mapping and planning framework for agile flights is validated in simulation, showing replanning times of 5-40 ms in cluttered environments, a value that is 3-30 times faster than similar state-of-the-art planning algorithms.
NanoMap: Fast, Uncertainty-Aware Proximity Queries with Lazy Search over Local 3D Data
Feb 25, 2018

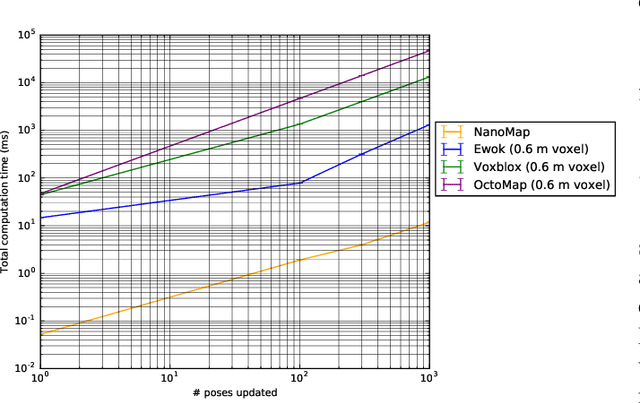
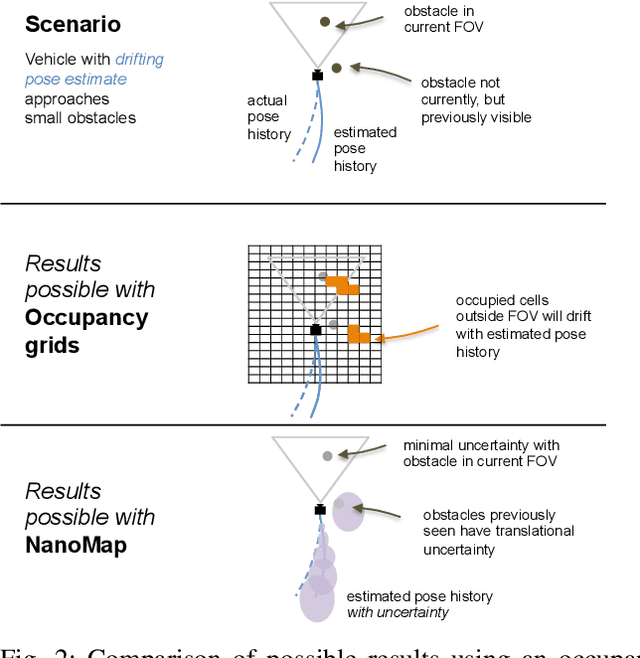
We would like robots to be able to safely navigate at high speed, efficiently use local 3D information, and robustly plan motions that consider pose uncertainty of measurements in a local map structure. This is hard to do with previously existing mapping approaches, like occupancy grids, that are focused on incrementally fusing 3D data into a common world frame. In particular, both their fragile sensitivity to state estimation errors and computational cost can be limiting. We develop an alternative framework, NanoMap, which alleviates the need for global map fusion and enables a motion planner to efficiently query pose-uncertainty-aware local 3D geometric information. The key idea of NanoMap is to store a history of noisy relative pose transforms and search over a corresponding set of depth sensor measurements for the minimum-uncertainty view of a queried point in space. This approach affords a variety of capabilities not offered by traditional mapping techniques: (a) the pose uncertainty associated with 3D data can be incorporated in motion planning, (b) poses can be updated (i.e., from loop closures) with minimal computational effort, and (c) 3D data can be fused lazily for the purpose of planning. We provide an open-source implementation of NanoMap, and analyze its capabilities and computational efficiency in simulation experiments. Finally, we demonstrate in hardware its effectiveness for fast 3D obstacle avoidance onboard a quadrotor flying up to 10 m/s.