 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNo Parameters, No Problem: 3D Gaussian Splatting without Camera Intrinsics and Extrinsics
Feb 27, 2025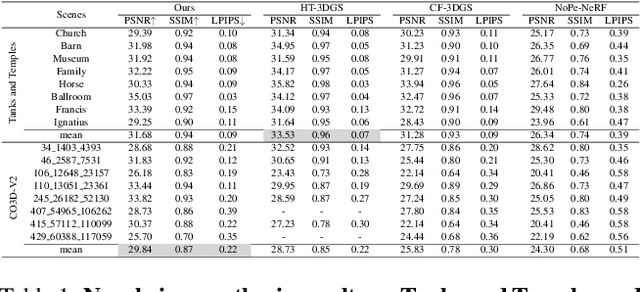
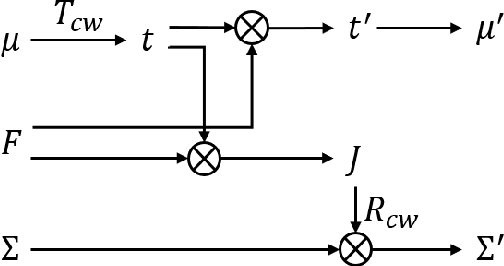
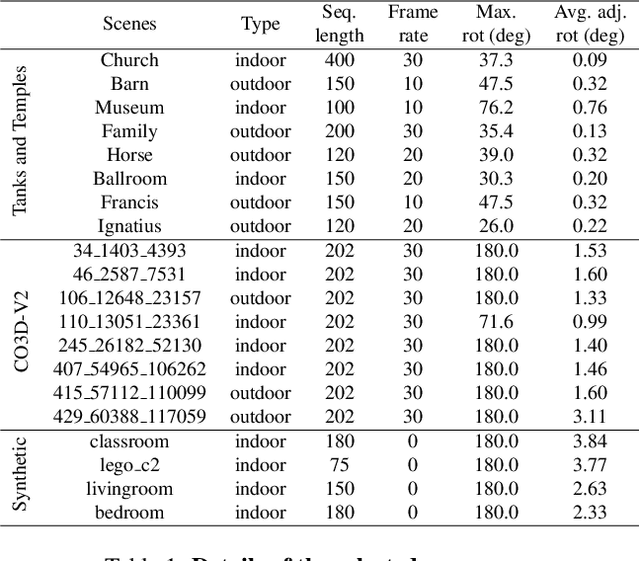
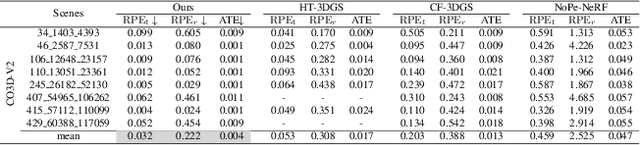
While 3D Gaussian Splatting (3DGS) has made significant progress in scene reconstruction and novel view synthesis, it still heavily relies on accurately pre-computed camera intrinsics and extrinsics, such as focal length and camera poses. In order to mitigate this dependency, the previous efforts have focused on optimizing 3DGS without the need for camera poses, yet camera intrinsics remain necessary. To further loose the requirement, we propose a joint optimization method to train 3DGS from an image collection without requiring either camera intrinsics or extrinsics. To achieve this goal, we introduce several key improvements during the joint training of 3DGS. We theoretically derive the gradient of the camera intrinsics, allowing the camera intrinsics to be optimized simultaneously during training. Moreover, we integrate global track information and select the Gaussian kernels associated with each track, which will be trained and automatically rescaled to an infinitesimally small size, closely approximating surface points, and focusing on enforcing multi-view consistency and minimizing reprojection errors, while the remaining kernels continue to serve their original roles. This hybrid training strategy nicely unifies the camera parameters estimation and 3DGS training. Extensive evaluations demonstrate that the proposed method achieves state-of-the-art (SOTA) performance on both public and synthetic datasets.
PTZ-Calib: Robust Pan-Tilt-Zoom Camera Calibration
Feb 13, 2025
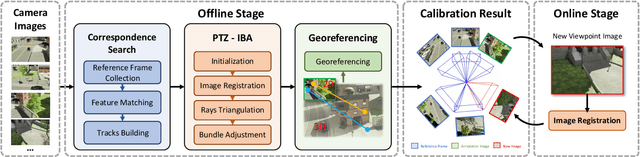
In this paper, we present PTZ-Calib, a robust two-stage PTZ camera calibration method, that efficiently and accurately estimates camera parameters for arbitrary viewpoints. Our method includes an offline and an online stage. In the offline stage, we first uniformly select a set of reference images that sufficiently overlap to encompass a complete 360{\deg} view. We then utilize the novel PTZ-IBA (PTZ Incremental Bundle Adjustment) algorithm to automatically calibrate the cameras within a local coordinate system. Additionally, for practical application, we can further optimize camera parameters and align them with the geographic coordinate system using extra global reference 3D information. In the online stage, we formulate the calibration of any new viewpoints as a relocalization problem. Our approach balances the accuracy and computational efficiency to meet real-world demands. Extensive evaluations demonstrate our robustness and superior performance over state-of-the-art methods on various real and synthetic datasets. Datasets and source code can be accessed online at https://github.com/gjgjh/PTZ-Calib