 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFairness-Aware Beamforming for Polarimetric ISAC Systems with Polarization-Reconfigurable Antennas
Mar 18, 2026Polarization diversity offers significant flexibility for enhancing integrated sensing and communications (ISAC). However, conventional dual-polarized arrays typically require dedicated radio-frequency (RF) chains for each polarization branch, leading to prohibitive hardware costs. To address this, polarization-reconfigurable (PR) antennas have emerged as a cost-effective alternative, enabling polarization flexibility with reduced hardware complexity by driving two polarization branches with a single RF chain. In this paper, we investigate fairness-aware beamforming for ISAC systems equipped with PR antennas. Specifically, we jointly optimize the transmit beamforming and PR control coefficients to maximize the minimum signal-to-interference-plus-noise ratio (SINR) for communication users and the minimum signal-to-clutter-plus-noise ratio (SCNR) for sensing targets. The resulting problem is highly nonconvex and nonsmooth due to the strong coupling among optimization variables in the max-min objective, as well as the nonconvex spherical constraints imposed by the PR antennas. To tackle this, we derive an equivalent smooth reformulation by introducing auxiliary variables and transforming the minimum operators into inequality constraints. Subsequently, we develop an exact-penalty product Riemannian manifold gradient descent (EP-PRMGD) algorithm, which integrates an exact penalty method with Riemannian optimization to guarantee convergence to a Karush-Kuhn-Tucker (KKT) point. Numerical results demonstrate that the proposed PR-enabled ISAC scheme achieves performance comparable to dual-polarized architectures while utilizing only half the RF chains, thereby validating its effectiveness in balancing fairness and hardware efficiency.
Low-Cost Physical-Layer Security Design for IRS-Assisted mMIMO Systems with One-Bit DACs
Feb 15, 2026Integrating massive multiple-input multiple-output (mMIMO) systems with intelligent reflecting surfaces (IRS) presents a promising paradigm for enhancing physical-layer security (PLS) in wireless communications. However, deploying high-resolution quantizers in large-scale mMIMO arrays, along with numerous IRS elements, leads to substantial hardware complexity. To address these challenges, this paper proposes a cost-effective PLS design for IRS-assisted mMIMO systems by employing one-bit digital-to-analog converters (DACs). The focus is on jointly optimizing one-bit quantized precoding at the transmitter and constant-modulus phase shifts at the IRS to maximize the secrecy rate. This leads to a highly non-convex fractional secrecy rate maximization (SRM) problem. To efficiently solve this problem, two algorithms are proposed: (1) the WMMSE-PDD algorithm, which reformulates the SRM problem into a sequence of non-fractional programs with auxiliary variables using the weighted minimum mean-square error (WMMSE) method and solves them via the penalty dual decomposition (PDD) approach, achieving superior secrecy performance; and (2) the exact penalty product Riemannian gradient descent (EPPRGD) algorithm, which transforms the SRM problem into an unconstrained optimization over a product Riemannian manifold, eliminating auxiliary variables and enabling faster convergence with a slight trade-off in secrecy performance. Both algorithms provide analytical solutions at each iteration and are proven to converge to Karush-Kuhn-Tucker (KKT) points. Simulation results confirm the effectiveness of the proposed methods and highlight their respective advantages.
Cooperative Double IRS aided Secure Communication for MIMO-OFDM Systems
Jan 27, 2026Cooperative double intelligent reflecting surface (double-IRS) has emerged as a promising approach for enhancing physical layer security (PLS) in MIMO systems. However, existing studies are limited to narrowband scenarios and fail to address wideband MIMO-OFDM. In this regime, frequency-flat IRS phases and cascaded IRS links cause severe coupling, rendering narrowband designs inapplicable. To overcome this challenge, we introduce cooperative double-IRS-assisted wideband MIMO-OFDM and propose an efficient manifold-based solution. By regarding the power and constant modulus constraints as Riemannian manifolds, we reformulate the non-convex secrecy sum rate maximization as an unconstrained optimization on a product manifold. Building on this formulation, we further develop a product Riemannian gradient descent (PRGD) algorithm with guaranteed stationary convergence. Simulation results demonstrate that the proposed scheme effectively resolves the OFDM coupling issue and achieves significant secrecy rate gains, outperforming single-IRS and distributed multi-IRS benchmarks by 32.0% and 22.3%, respectively.
Constant-Modulus Secure Analog Beamforming for an IRS-Assisted Communication System with Large-Scale Antenna Array
Nov 19, 2025



Physical layer security (PLS) is an important technology in wireless communication systems to safeguard communication privacy and security between transmitters and legitimate users. The integration of large-scale antenna arrays (LSAA) and intelligent reflecting surfaces (IRS) has emerged as a promising approach to enhance PLS. However, LSAA requires a dedicated radio frequency (RF) chain for each antenna element, and IRS comprises hundreds of reflecting micro-antennas, leading to increased hardware costs and power consumption. To address this, cost-effective solutions like constant modulus analog beamforming (CMAB) have gained attention. This paper investigates PLS in IRS-assisted communication systems with a focus on jointly designing the CMAB at the transmitter and phase shifts at the IRS to maximize the secrecy rate. The resulting secrecy rate maximization (SRM) problem is non-convex. To solve the problem efficiently, we propose two algorithms: (1) the time-efficient Dinkelbach-BSUM algorithm, which reformulates the fractional problem into a series of quadratic programs using the Dinkelbach method and solves them via block successive upper-bound minimization (BSUM), and (2) the product manifold conjugate gradient descent (PMCGD) algorithm, which provides a better solution at the cost of slightly higher computational time by transforming the problem into an unconstrained optimization on a Riemannian product manifold and solving it using the conjugate gradient descent (CGD) algorithm. Simulation results validate the effectiveness of the proposed algorithms and highlight their distinct advantages.
Enhancing Physical Layer Security in MIMO Systems Assisted by Beyond-Diagonal Reconfigurable Intelligent Surfaces
Nov 19, 2025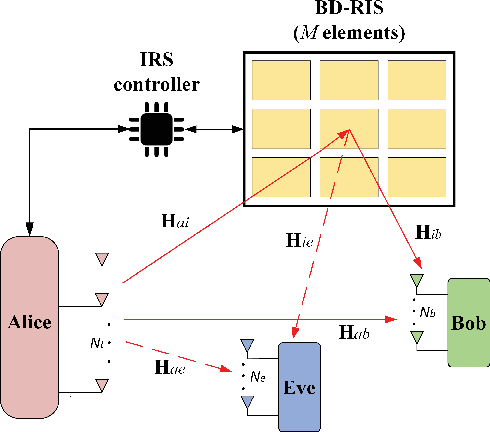
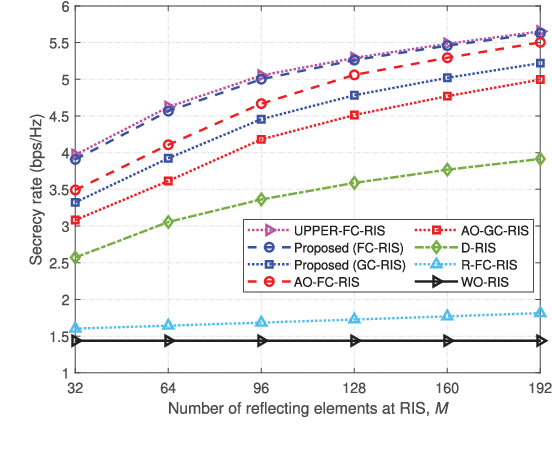
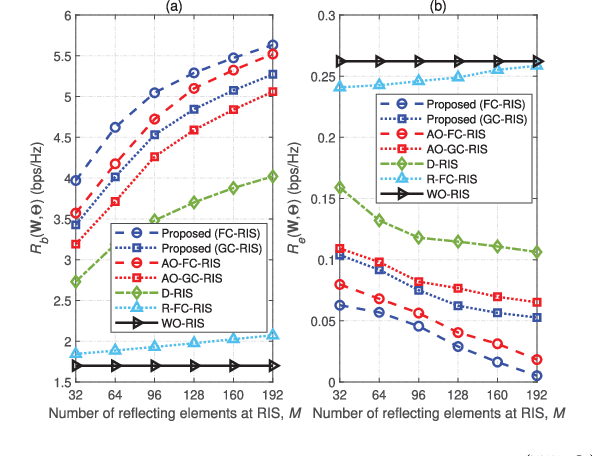
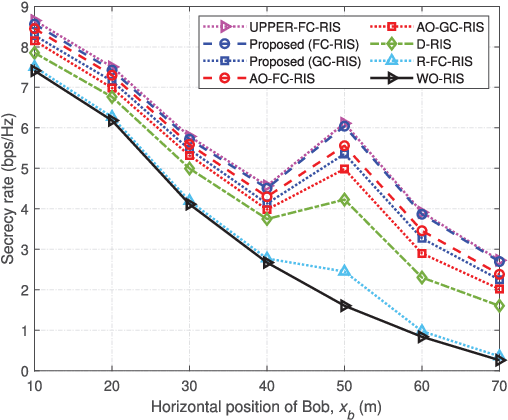
Reconfigurable intelligent surfaces (RISs) hold significant promise for enhancing physical layer security (PLS). However, conventional RISs are typically modeled using diagonal scattering matrices, capturing only independent reflections from each reflecting element, which limits their flexibility in channel manipulation. In contrast, beyond-diagonal RISs (BD-RISs) employ non-diagonal scattering matrices enabled by active and tunable inter-element connections through a shared impedance network. This architecture significantly enhances channel shaping capabilities, creating new opportunities for advanced PLS techniques. This paper investigates PLS in a multiple-input multiple-output (MIMO) system assisted by BD-RISs, where a multi-antenna transmitter sends confidential information to a multi-antenna legitimate user while a multi-antenna eavesdropper attempts interception. To maximize the secrecy rate (SR), we formulate it as a non-convex optimization problem by jointly optimizing the transmit beamforming and BD-RIS REs under power and structural constraints. To solve this problem, we first introduce an auxiliary variable to decouple BD-RIS constraints. We then propose a low-complexity penalty product Riemannian conjugate gradient descent (P-PRCGD) method, which combines the augmented Lagrangian (AL) approach with the product manifold gradient descent (PMGD) method to obtain a Karush-Kuhn-Tucker (KKT) solution. Simulation results confirm that BD-RIS-assisted systems significantly outperform conventional RIS-assisted systems in PLS performance.
Joint Analog Beamforming and Antenna Position Design for Secure Communication systems With Movable Antennas
Nov 19, 2025Movable antennas (MA) are a novel technology that allows for the flexible adjustment of antenna positions within a specified region, thereby enhancing the performance of wireless communication systems. In this paper, we explore the use of MA to improve physical layer security in an analog beamforming (AB) communication system. Our goal is to maximize the secrecy rate by jointly optimizing the transmit AB and MA position, subject to constant modulus (CM) constraints on the AB and position constraints for the MA. The resulting problem is non-convex, and we propose a penalty product manifold (PPM) method to solve it efficiently. Specifically, we convert the inequality constraints related to MA position into a penalty function using smoothing techniques, thereby reformulating the problem as an unconstrained optimization on the product manifold space (PMS). We then derive a parallel conjugate gradient descent (PCGD) algorithm to update both the AB and MA position on the PMS. This method is efficient, providing an analytical solution at each step and ensuring convergence to a KKT point. Simulation results show that the MA system achieves a higher secrecy rate than systems with fixed-position antennas.
Where Paths Collide: A Comprehensive Survey of Classic and Learning-Based Multi-Agent Pathfinding
May 25, 2025Multi-Agent Path Finding (MAPF) is a fundamental problem in artificial intelligence and robotics, requiring the computation of collision-free paths for multiple agents navigating from their start locations to designated goals. As autonomous systems become increasingly prevalent in warehouses, urban transportation, and other complex environments, MAPF has evolved from a theoretical challenge to a critical enabler of real-world multi-robot coordination. This comprehensive survey bridges the long-standing divide between classical algorithmic approaches and emerging learning-based methods in MAPF research. We present a unified framework that encompasses search-based methods (including Conflict-Based Search, Priority-Based Search, and Large Neighborhood Search), compilation-based approaches (SAT, SMT, CSP, ASP, and MIP formulations), and data-driven techniques (reinforcement learning, supervised learning, and hybrid strategies). Through systematic analysis of experimental practices across 200+ papers, we uncover significant disparities in evaluation methodologies, with classical methods typically tested on larger-scale instances (up to 200 by 200 grids with 1000+ agents) compared to learning-based approaches (predominantly 10-100 agents). We provide a comprehensive taxonomy of evaluation metrics, environment types, and baseline selections, highlighting the need for standardized benchmarking protocols. Finally, we outline promising future directions including mixed-motive MAPF with game-theoretic considerations, language-grounded planning with large language models, and neural solver architectures that combine the rigor of classical methods with the flexibility of deep learning. This survey serves as both a comprehensive reference for researchers and a practical guide for deploying MAPF solutions in increasingly complex real-world applications.
Cost-Effective RF Fingerprinting Based on Hybrid CVNN-RF Classifier with Automated Multi-Dimensional Early-Exit Strategy
Jun 21, 2024



While the Internet of Things (IoT) technology is booming and offers huge opportunities for information exchange, it also faces unprecedented security challenges. As an important complement to the physical layer security technologies for IoT, radio frequency fingerprinting (RFF) is of great interest due to its difficulty in counterfeiting. Recently, many machine learning (ML)-based RFF algorithms have emerged. In particular, deep learning (DL) has shown great benefits in automatically extracting complex and subtle features from raw data with high classification accuracy. However, DL algorithms face the computational cost problem as the difficulty of the RFF task and the size of the DNN have increased dramatically. To address the above challenge, this paper proposes a novel costeffective early-exit neural network consisting of a complex-valued neural network (CVNN) backbone with multiple random forest branches, called hybrid CVNN-RF. Unlike conventional studies that use a single fixed DL model to process all RF samples, our hybrid CVNN-RF considers differences in the recognition difficulty of RF samples and introduces an early-exit mechanism to dynamically process the samples. When processing "easy" samples that can be well classified with high confidence, the hybrid CVNN-RF can end early at the random forest branch to reduce computational cost. Conversely, subsequent network layers will be activated to ensure accuracy. To further improve the early-exit rate, an automated multi-dimensional early-exit strategy is proposed to achieve scheduling control from multiple dimensions within the network depth and classification category. Finally, our experiments on the public ADS-B dataset show that the proposed algorithm can reduce the computational cost by 83% while improving the accuracy by 1.6% under a classification task with 100 categories.
One-Bit Channel Estimation for IRS-aided Millimeter-Wave Massive MU-MISO System
Sep 29, 2023



Recently, intelligent reflecting surface (IRS)-assisted communication has gained considerable attention due to its advantage in extending the coverage and compensating the path loss with low-cost passive metasurface. This paper considers the uplink channel estimation for IRS-aided multiuser massive MISO communications with one-bit ADCs at the base station (BS). The use of one-bit ADC is impelled by the low-cost and power efficient implementation of massive antennas techniques. However, the passiveness of IRS and the lack of signal level information after one-bit quantization make the IRS channel estimation challenging. To tackle this problem, we exploit the structured sparsity of the user-IRS-BS cascaded channels and develop three channel estimators, each of which utilizes the structured sparsity at different levels. Specifically, the first estimator exploits the elementwise sparsity of the cascaded channel and employs the sparse Bayesian learning (SBL) to infer the channel responses via the type-II maximum likelihood (ML) estimation. However, due to the one-bit quantization, the type-II ML in general is intractable. As such, a variational expectation-maximization (EM) algorithm is custom-derived to iteratively compute an ML solution. The second estimator utilizes the common row-structured sparsity induced by the IRS-to-BS channel shared among the users, and develops another type-II ML solution via the block SBL (BSBL) and the variational EM. To further improve the performance of BSBL, a third two-stage estimator is proposed, which can utilize both the common row-structured sparsity and the column-structured sparsity arising from the limited scattering around the users. Simulation results show that the more diverse structured sparsity is exploited, the better estimation performance is achieved, and that the proposed estimators are superior to state-of-the-art one-bit estimators.