 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Method for Target Detection Based on Mmw Radar and Vision Fusion
Mar 25, 2024An efficient and accurate traffic monitoring system often takes advantages of multi-sensor detection to ensure the safety of urban traffic, promoting the accuracy and robustness of target detection and tracking. A method for target detection using Radar-Vision Fusion Path Aggregation Fully Convolutional One-Stage Network (RV-PAFCOS) is proposed in this paper, which is extended from Fully Convolutional One-Stage Network (FCOS) by introducing the modules of radar image processing branches, radar-vision fusion and path aggregation. The radar image processing branch mainly focuses on the image modeling based on the spatiotemporal calibration of millimeter-wave (mmw) radar and cameras, taking the conversion of radar point clouds to radar images. The fusion module extracts features of radar and optical images based on the principle of spatial attention stitching criterion. The path aggregation module enhances the reuse of feature layers, combining the positional information of shallow feature maps with deep semantic information, to obtain better detection performance for both large and small targets. Through the experimental analysis, the method proposed in this paper can effectively fuse the mmw radar and vision perceptions, showing good performance in traffic target detection.
Stochastic Behavior of the Nonnegative Least Mean Fourth Algorithm for Stationary Gaussian Inputs and Slow Learning
Aug 24, 2015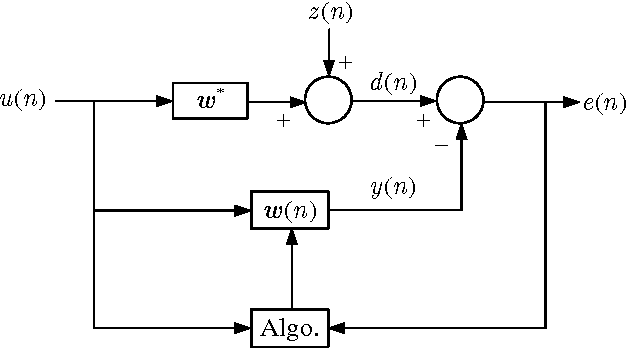
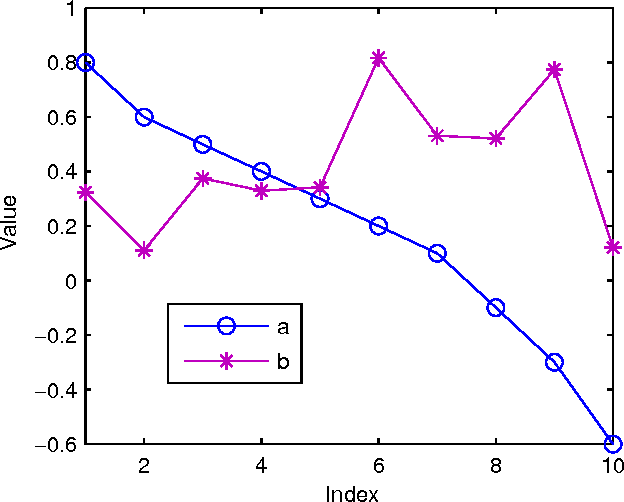
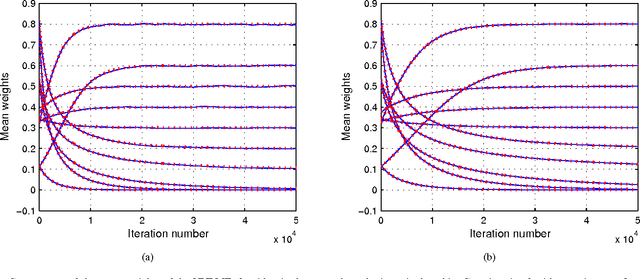
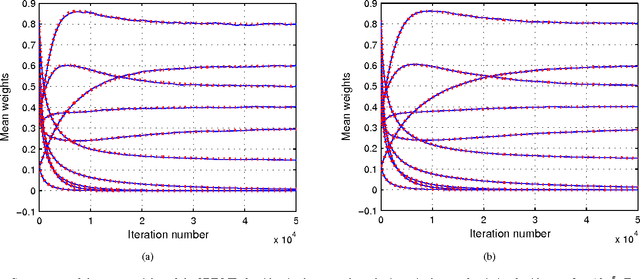
Some system identification problems impose nonnegativity constraints on the parameters to estimate due to inherent physical characteristics of the unknown system. The nonnegative least-mean-square (NNLMS) algorithm and its variants allow to address this problem in an online manner. A nonnegative least mean fourth (NNLMF) algorithm has been recently proposed to improve the performance of these algorithms in cases where the measurement noise is not Gaussian. This paper provides a first theoretical analysis of the stochastic behavior of the NNLMF algorithm for stationary Gaussian inputs and slow learning. Simulation results illustrate the accuracy of the proposed analysis.