 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Method for Target Detection Based on Mmw Radar and Vision Fusion
Mar 25, 2024An efficient and accurate traffic monitoring system often takes advantages of multi-sensor detection to ensure the safety of urban traffic, promoting the accuracy and robustness of target detection and tracking. A method for target detection using Radar-Vision Fusion Path Aggregation Fully Convolutional One-Stage Network (RV-PAFCOS) is proposed in this paper, which is extended from Fully Convolutional One-Stage Network (FCOS) by introducing the modules of radar image processing branches, radar-vision fusion and path aggregation. The radar image processing branch mainly focuses on the image modeling based on the spatiotemporal calibration of millimeter-wave (mmw) radar and cameras, taking the conversion of radar point clouds to radar images. The fusion module extracts features of radar and optical images based on the principle of spatial attention stitching criterion. The path aggregation module enhances the reuse of feature layers, combining the positional information of shallow feature maps with deep semantic information, to obtain better detection performance for both large and small targets. Through the experimental analysis, the method proposed in this paper can effectively fuse the mmw radar and vision perceptions, showing good performance in traffic target detection.
A Simulation Method for MMW Radar Sensing in Traffic Intersection Based on BART Algorithm
Aug 29, 2022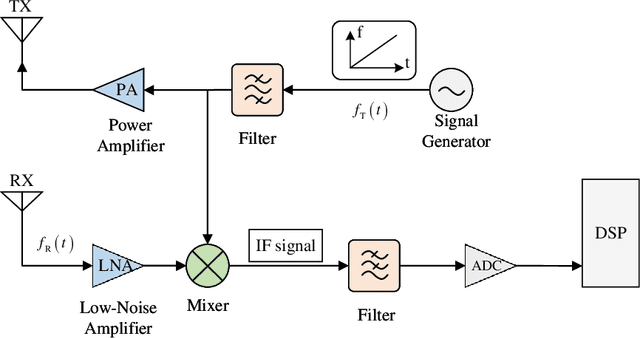
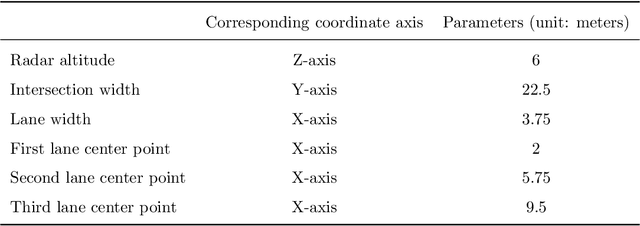
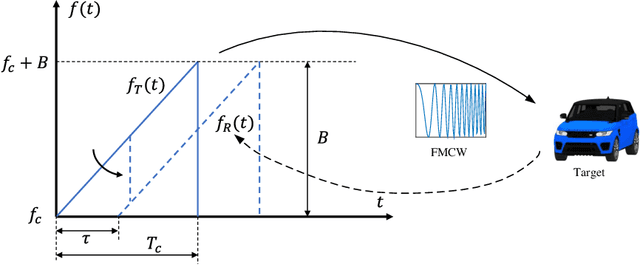
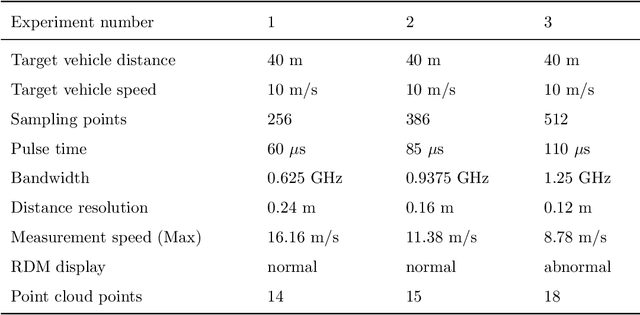
Millimeter-wave (mmw) radar is indispensable for Intelligent Transportation Systems (ITS), which can monitor traffic conditions in all weathers. An end-to-end simulation method for mmw radar monitoring and identification at traffic intersections is proposed in this paper. In this method, a virtual intersection scenario model is constructed, and the scattering coefficient of the target is calculated using the Bidirectional Analytical Ray Tracing (BART) algorithm. Combined with the generation of time-domain waveforms, the operation of frequency-domain convolution is simplified by inverse Fourier transform, and the echo signals received by the sparse array are simulated. After raw signal processing, point cloud images containing target position information and Range-Doppler Map (RDM) containing target state feature are obtained. The performance of mmw radar in detecting the specific location information of the target is evaluated by analyzing point cloud images. In addition, a self-defined convolutional neural network is introduced in this paper to evaluate the object recognition performance of the RDM. After the training of the neural network, the classification accuracy of this method for four types of vehicle targets can reach 92%.