 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArbitrary Shape Text Detection via Segmentation with Probability Maps
Aug 26, 2022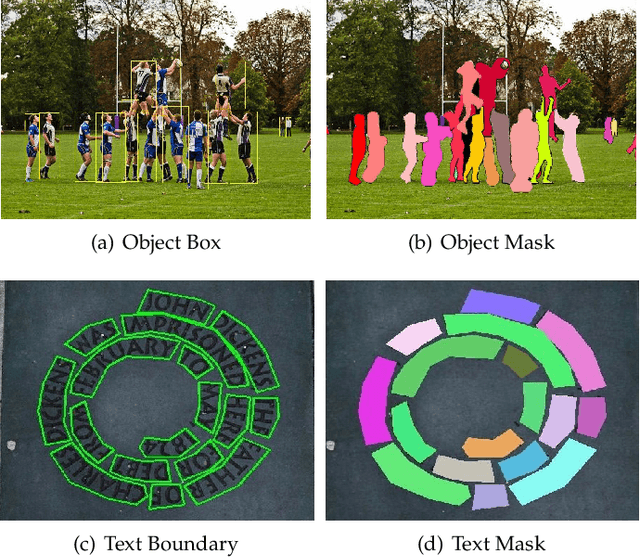
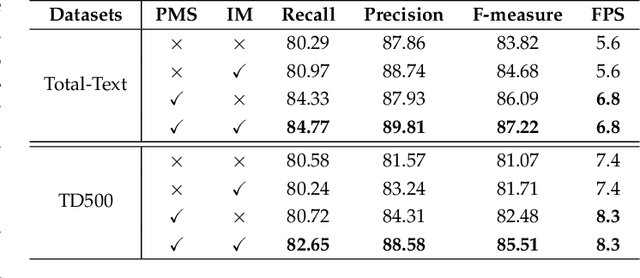

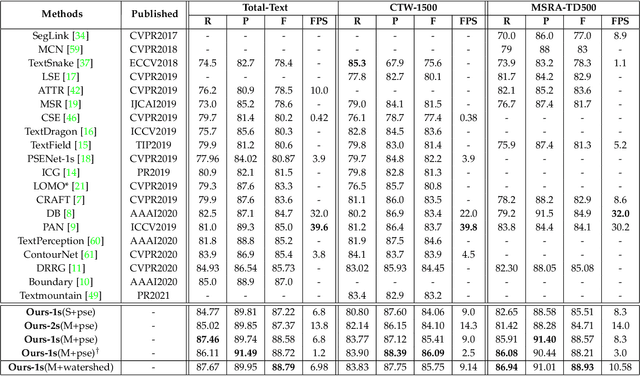
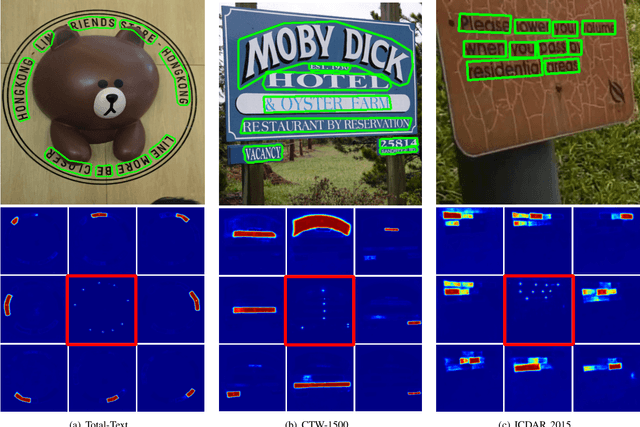
Arbitrary shape text detection is a challenging task due to the significantly varied sizes and aspect ratios, arbitrary orientations or shapes, inaccurate annotations, etc. Due to the scalability of pixel-level prediction, segmentation-based methods can adapt to various shape texts and hence attracted considerable attention recently. However, accurate pixel-level annotations of texts are formidable, and the existing datasets for scene text detection only provide coarse-grained boundary annotations. Consequently, numerous misclassified text pixels or background pixels inside annotations always exist, degrading the performance of segmentation-based text detection methods. Generally speaking, whether a pixel belongs to text or not is highly related to the distance with the adjacent annotation boundary. With this observation, in this paper, we propose an innovative and robust segmentation-based detection method via probability maps for accurately detecting text instances. To be concrete, we adopt a Sigmoid Alpha Function (SAF) to transfer the distances between boundaries and their inside pixels to a probability map. However, one probability map can not cover complex probability distributions well because of the uncertainty of coarse-grained text boundary annotations. Therefore, we adopt a group of probability maps computed by a series of Sigmoid Alpha Functions to describe the possible probability distributions. In addition, we propose an iterative model to learn to predict and assimilate probability maps for providing enough information to reconstruct text instances. Finally, simple region growth algorithms are adopted to aggregate probability maps to complete text instances. Experimental results demonstrate that our method achieves state-of-the-art performance in terms of detection accuracy on several benchmarks.
Graph Fusion Network for Multi-Oriented Object Detection
May 07, 2022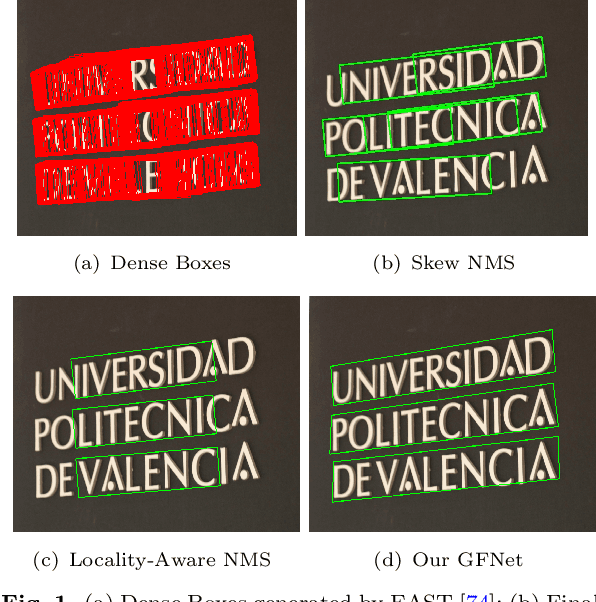
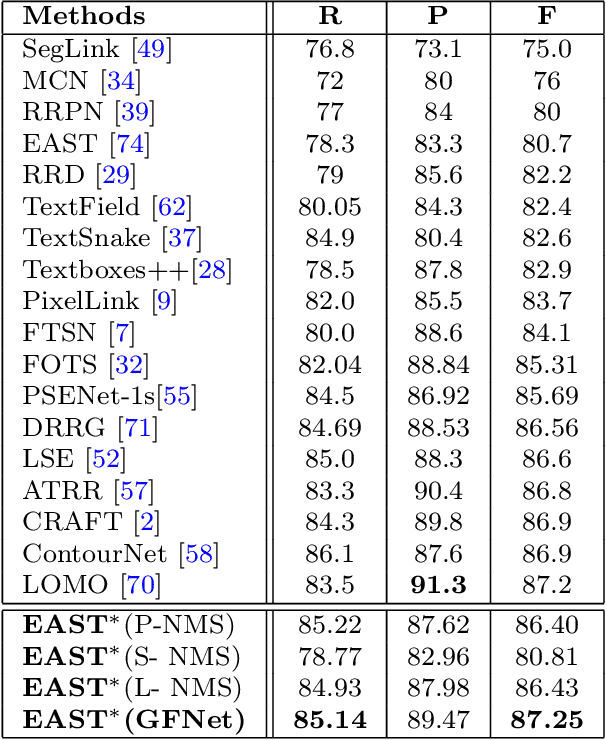
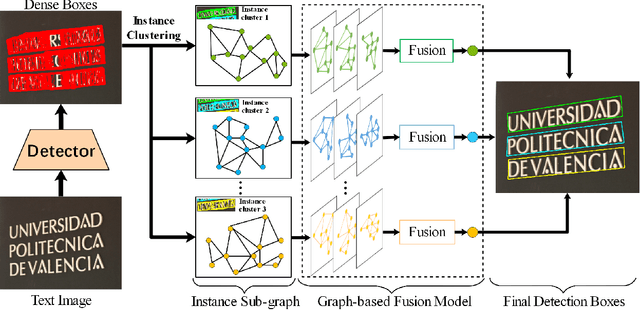
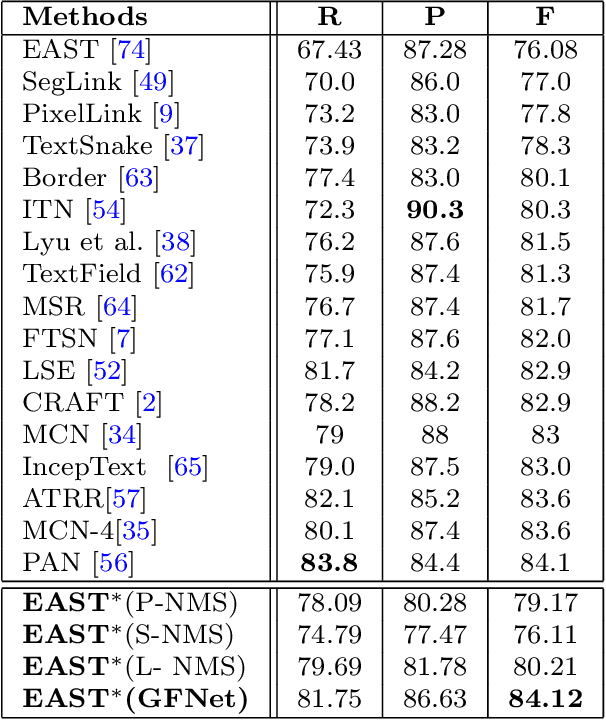
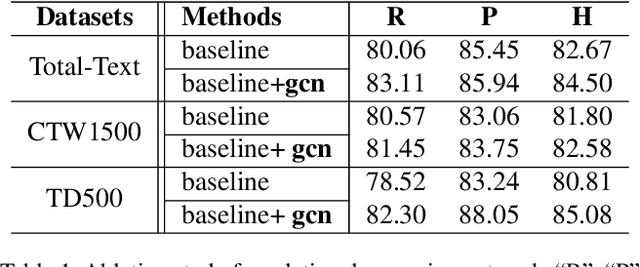
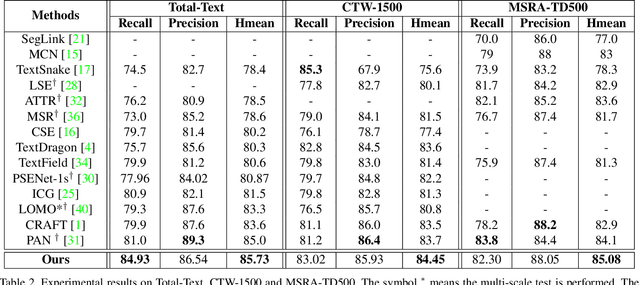
In object detection, non-maximum suppression (NMS) methods are extensively adopted to remove horizontal duplicates of detected dense boxes for generating final object instances. However, due to the degraded quality of dense detection boxes and not explicit exploration of the context information, existing NMS methods via simple intersection-over-union (IoU) metrics tend to underperform on multi-oriented and long-size objects detection. Distinguishing with general NMS methods via duplicate removal, we propose a novel graph fusion network, named GFNet, for multi-oriented object detection. Our GFNet is extensible and adaptively fuse dense detection boxes to detect more accurate and holistic multi-oriented object instances. Specifically, we first adopt a locality-aware clustering algorithm to group dense detection boxes into different clusters. We will construct an instance sub-graph for the detection boxes belonging to one cluster. Then, we propose a graph-based fusion network via Graph Convolutional Network (GCN) to learn to reason and fuse the detection boxes for generating final instance boxes. Extensive experiments both on public available multi-oriented text datasets (including MSRA-TD500, ICDAR2015, ICDAR2017-MLT) and multi-oriented object datasets (DOTA) verify the effectiveness and robustness of our method against general NMS methods in multi-oriented object detection.
Kernel Proposal Network for Arbitrary Shape Text Detection
Mar 12, 2022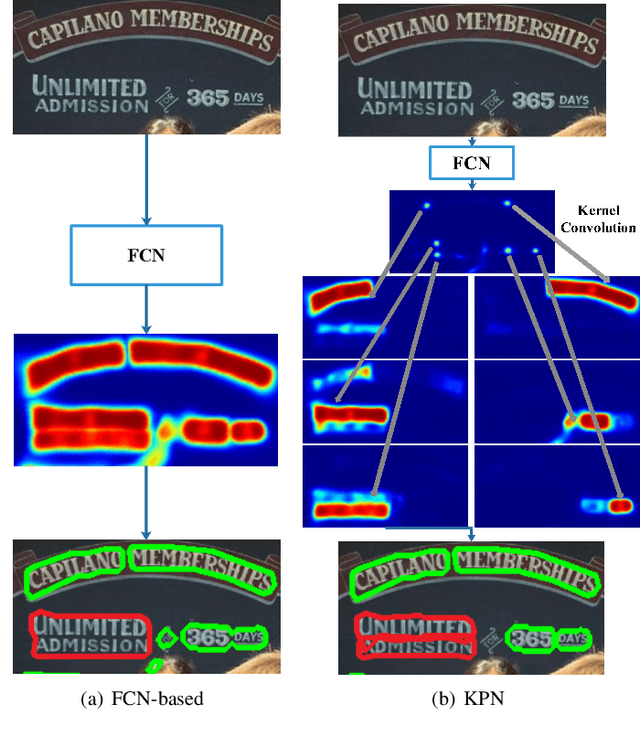
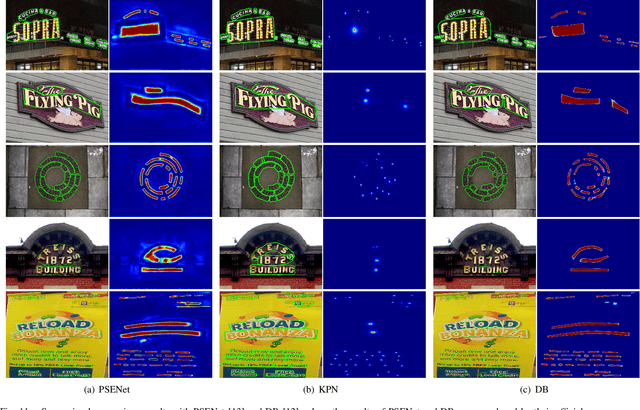
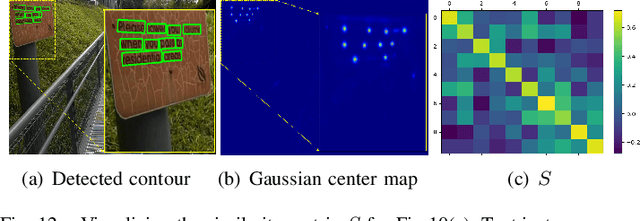
Segmentation-based methods have achieved great success for arbitrary shape text detection. However, separating neighboring text instances is still one of the most challenging problems due to the complexity of texts in scene images. In this paper, we propose an innovative Kernel Proposal Network (dubbed KPN) for arbitrary shape text detection. The proposed KPN can separate neighboring text instances by classifying different texts into instance-independent feature maps, meanwhile avoiding the complex aggregation process existing in segmentation-based arbitrary shape text detection methods. To be concrete, our KPN will predict a Gaussian center map for each text image, which will be used to extract a series of candidate kernel proposals (i.e., dynamic convolution kernel) from the embedding feature maps according to their corresponding keypoint positions. To enforce the independence between kernel proposals, we propose a novel orthogonal learning loss (OLL) via orthogonal constraints. Specifically, our kernel proposals contain important self-information learned by network and location information by position embedding. Finally, kernel proposals will individually convolve all embedding feature maps for generating individual embedded maps of text instances. In this way, our KPN can effectively separate neighboring text instances and improve the robustness against unclear boundaries. To our knowledge, our work is the first to introduce the dynamic convolution kernel strategy to efficiently and effectively tackle the adhesion problem of neighboring text instances in text detection. Experimental results on challenging datasets verify the impressive performance and efficiency of our method. The code and model are available at https://github.com/GXYM/KPN.
Deep Relational Reasoning Graph Network for Arbitrary Shape Text Detection
Mar 17, 2020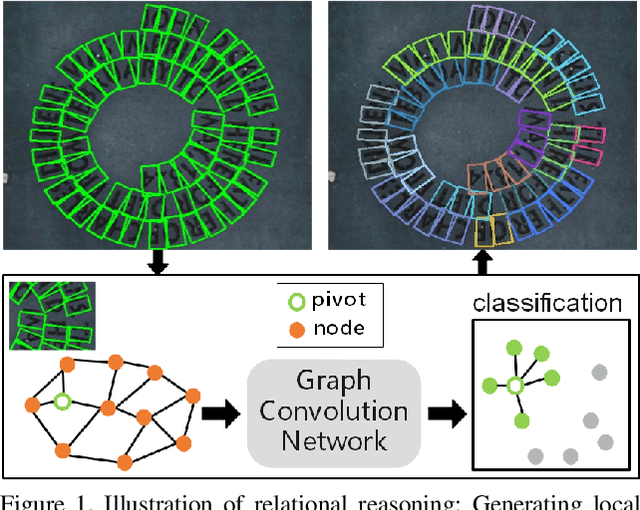

Arbitrary shape text detection is a challenging task due to the high variety and complexity of scenes texts. In this paper, we propose a novel unified relational reasoning graph network for arbitrary shape text detection. In our method, an innovative local graph bridges a text proposal model via Convolutional Neural Network (CNN) and a deep relational reasoning network via Graph Convolutional Network (GCN), making our network end-to-end trainable. To be concrete, every text instance will be divided into a series of small rectangular components, and the geometry attributes (e.g., height, width, and orientation) of the small components will be estimated by our text proposal model. Given the geometry attributes, the local graph construction model can roughly establish linkages between different text components. For further reasoning and deducing the likelihood of linkages between the component and its neighbors, we adopt a graph-based network to perform deep relational reasoning on local graphs. Experiments on public available datasets demonstrate the state-of-the-art performance of our method.