 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCybernetic Marionette: Channeling Collective Agency Through a Wearable Robot in a Live Dancer-Robot Duet
Jun 11, 2025We describe DANCE^2, an interactive dance performance in which audience members channel their collective agency into a dancer-robot duet by voting on the behavior of a wearable robot affixed to the dancer's body. At key moments during the performance, the audience is invited to either continue the choreography or override it, shaping the unfolding interaction through real-time collective input. While post-performance surveys revealed that participants felt their choices meaningfully influenced the performance, voting data across four public performances exhibited strikingly consistent patterns. This tension between what audience members do, what they feel, and what actually changes highlights a complex interplay between agentive behavior, the experience of agency, and power. We reflect on how choreography, interaction design, and the structure of the performance mediate this relationship, offering a live analogy for algorithmically curated digital systems where agency is felt, but not exercised.
PCB Renewal: Iterative Reuse of PCB Substrates for Sustainable Electronic Making
Feb 18, 2025PCB (printed circuit board) substrates are often single-use, leading to material waste in electronics making. We introduce PCB Renewal, a novel technique that "erases" and "reconfigures" PCB traces by selectively depositing conductive epoxy onto outdated areas, transforming isolated paths into conductive planes that support new traces. We present the PCB Renewal workflow, evaluate its electrical performance and mechanical durability, and model its sustainability impact, including material usage, cost, energy consumption, and time savings. We develop a software plug-in that guides epoxy deposition, generates updated PCB profiles, and calculates resource usage. To demonstrate PCB Renewal's effectiveness and versatility, we repurpose a single PCB across four design iterations spanning three projects: a camera roller, a WiFi radio, and an ESPboy game console. We also show how an outsourced double-layer PCB can be reconfigured, transforming it from an LED watch to an interactive cat toy. The paper concludes with limitations and future directions.
The Design of On-Body Robots for Older Adults
Feb 04, 2025



Wearable technology has significantly improved the quality of life for older adults, and the emergence of on-body, movable robots presents new opportunities to further enhance well-being. Yet, the interaction design for these robots remains under-explored, particularly from the perspective of older adults. We present findings from a two-phase co-design process involving 13 older adults to uncover design principles for on-body robots for this population. We identify a rich spectrum of potential applications and characterize a design space to inform how on-body robots should be built for older adults. Our findings highlight the importance of considering factors like co-presence, embodiment, and multi-modal communication. Our work offers design insights to facilitate the integration of on-body robots into daily life and underscores the value of involving older adults in the co-design process to promote usability and acceptance of emerging wearable robotic technologies.
Toucha11y: Making Inaccessible Public Touchscreens Accessible
May 06, 2023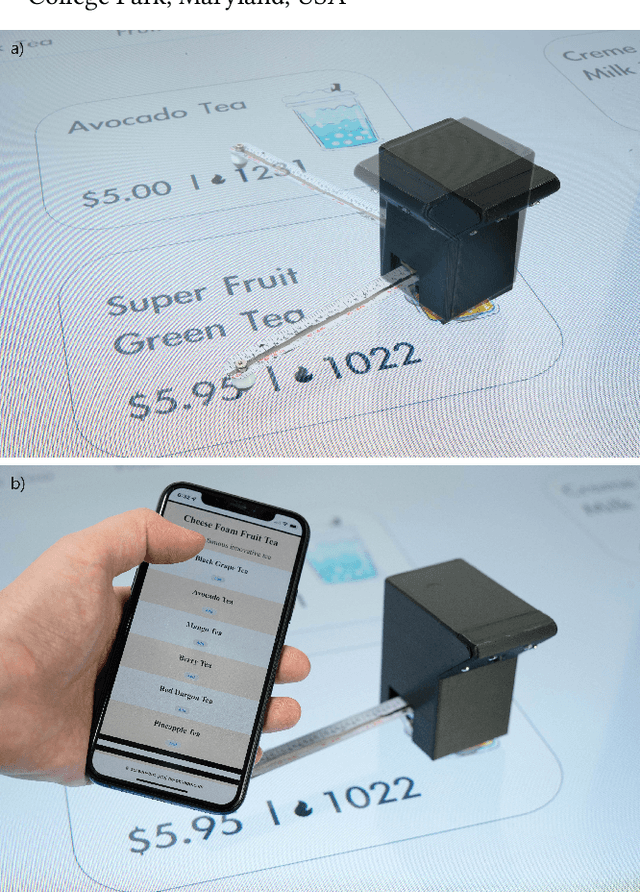
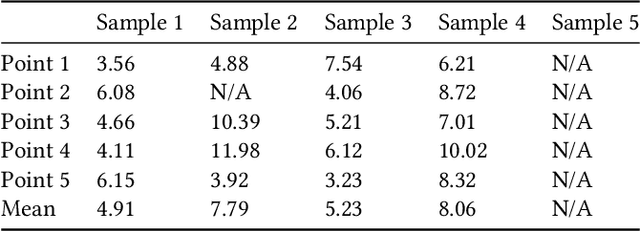
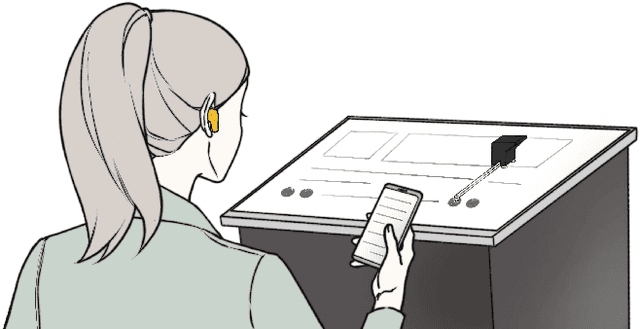

Despite their growing popularity, many public kiosks with touchscreens are inaccessible to blind people. Toucha11y is a working prototype that allows blind users to use existing inaccessible touchscreen kiosks independently and with little effort. Toucha11y consists of a mechanical bot that can be instrumented to an arbitrary touchscreen kiosk by a blind user and a companion app on their smartphone. The bot, once attached to a touchscreen, will recognize its content, retrieve the corresponding information from a database, and render it on the user's smartphone. As a result, a blind person can use the smartphone's built-in accessibility features to access content and make selections. The mechanical bot will detect and activate the corresponding touchscreen interface. We present the system design of Toucha11y along with a series of technical evaluations. Through a user study, we found out that Toucha11y could help blind users operate inaccessible touchscreen devices.
A Framework for Active Haptic Guidance Using Robotic Haptic Proxies
Jan 12, 2023Haptic feedback is an important component of creating an immersive virtual experience. Traditionally, haptic forces are rendered in response to the user's interactions with the virtual environment. In this work, we explore the idea of rendering haptic forces in a proactive manner, with the explicit intention to influence the user's behavior through compelling haptic forces. To this end, we present a framework for active haptic guidance in mixed reality, using one or more robotic haptic proxies to influence user behavior and deliver a safer and more immersive virtual experience. We provide details on common challenges that need to be overcome when implementing active haptic guidance, and discuss example applications that show how active haptic guidance can be used to influence the user's behavior. Finally, we apply active haptic guidance to a virtual reality navigation problem, and conduct a user study that demonstrates how active haptic guidance creates a safer and more immersive experience for users.
Calico: Relocatable On-cloth Wearables with Fast, Reliable, and Precise Locomotion
Aug 17, 2022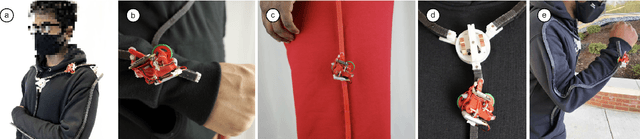
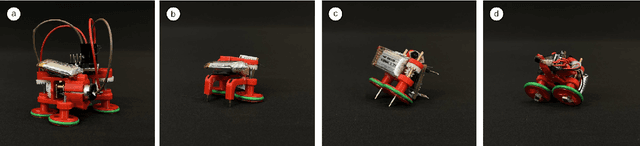
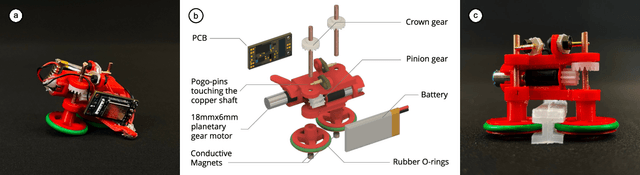
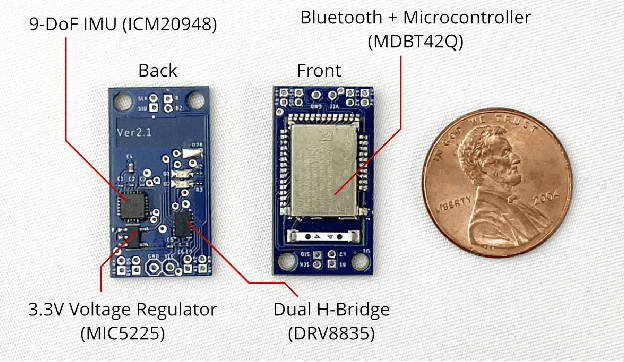
We explore Calico, a miniature relocatable wearable system with fast and precise locomotion for on-body interaction, actuation and sensing. Calico consists of a two-wheel robot and an on-cloth track mechanism or "railway," on which the robot travels. The robot is self-contained, small in size, and has additional sensor expansion options. The track system allows the robot to move along the user's body and reach any predetermined location. It also includes rotational switches to enable complex routing options when diverging tracks are presented. We report the design and implementation of Calico with a series of technical evaluations for system performance. We then present a few application scenarios, and user studies to understand the potential of Calico as a dance trainer and also explore the qualitative perception of our scenarios to inform future research in this space.