 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlant-Inspired Robot Design Metaphors for Ambient HRI
Jan 29, 2026Plants offer a paradoxical model for interaction: they are ambient, low-demand presences that nonetheless shape atmosphere, routines, and relationships through temporal rhythms and subtle expressions. In contrast, most human-robot interaction (HRI) has been grounded in anthropomorphic and zoomorphic paradigms, producing overt, high-demand forms of engagement. Using a Research through Design (RtD) methodology, we explore plants as metaphoric inspiration for HRI; we conducted iterative cycles of ideation, prototyping, and reflection to investigate what design primitives emerge from plant metaphors and morphologies, and how these primitives can be combined into expressive robotic forms. We present a suite of speculative, open-source prototypes that help probe plant-inspired presence, temporality, form, and gestures. We deepened our learnings from design and prototyping through prototype-centered workshops that explored people's perceptions and imaginaries of plant-inspired robots. This work contributes: (1) Set of plant-inspired robotic artifacts; (2) Designerly insights on how people perceive plant-inspired robots; and (3) Design consideration to inform how to use plant metaphors to reshape HRI.
Lantern: A Minimalist Robotic Object Platform
Jan 29, 2026Robotic objects are simple actuated systems that subtly blend into human environments. We design and introduce Lantern, a minimalist robotic object platform to enable building simple robotic artifacts. We conducted in-depth design and engineering iterations of Lantern's mechatronic architecture to meet specific design goals while maintaining a low build cost (~40 USD). As an extendable, open-source platform, Lantern aims to enable exploration of a range of HRI scenarios by leveraging human tendency to assign social meaning to simple forms. To evaluate Lantern's potential for HRI, we conducted a series of explorations: 1) a co-design workshop, 2) a sensory room case study, 3) distribution to external HRI labs, 4) integration into a graduate-level HRI course, and 5) public exhibitions with older adults and children. Our findings show that Lantern effectively evokes engagement, can support versatile applications ranging from emotion regulation to focused work, and serves as a viable platform for lowering barriers to HRI as a field.
The Design of On-Body Robots for Older Adults
Feb 04, 2025



Wearable technology has significantly improved the quality of life for older adults, and the emergence of on-body, movable robots presents new opportunities to further enhance well-being. Yet, the interaction design for these robots remains under-explored, particularly from the perspective of older adults. We present findings from a two-phase co-design process involving 13 older adults to uncover design principles for on-body robots for this population. We identify a rich spectrum of potential applications and characterize a design space to inform how on-body robots should be built for older adults. Our findings highlight the importance of considering factors like co-presence, embodiment, and multi-modal communication. Our work offers design insights to facilitate the integration of on-body robots into daily life and underscores the value of involving older adults in the co-design process to promote usability and acceptance of emerging wearable robotic technologies.
Interruption Handling for Conversational Robots
Jan 02, 2025Interruptions, a fundamental component of human communication, can enhance the dynamism and effectiveness of conversations, but only when effectively managed by all parties involved. Despite advancements in robotic systems, state-of-the-art systems still have limited capabilities in handling user-initiated interruptions in real-time. Prior research has primarily focused on post hoc analysis of interruptions. To address this gap, we present a system that detects user-initiated interruptions and manages them in real-time based on the interrupter's intent (i.e., cooperative agreement, cooperative assistance, cooperative clarification, or disruptive interruption). The system was designed based on interaction patterns identified from human-human interaction data. We integrated our system into an LLM-powered social robot and validated its effectiveness through a timed decision-making task and a contentious discussion task with 21 participants. Our system successfully handled 93.69% (n=104/111) of user-initiated interruptions. We discuss our learnings and their implications for designing interruption-handling behaviors in conversational robots.
Social Robots for Sleep Health: A Scoping Review
Mar 07, 2024Poor sleep health is an increasingly concerning public healthcare crisis, especially when coupled with a dwindling number of health professionals qualified to combat it. However, there is a growing body of scientific literature on the use of digital technologies in supporting and sustaining individuals' healthy sleep habits. Social robots are a relatively recent technology that has been used to facilitate health care interventions and may have potential in improving sleep health outcomes, as well. Social robots' unique characteristics -- such as anthropomorphic physical embodiment or effective communication methods -- help to engage users and motivate them to comply with specific interventions, thus improving the interventions' outcomes. This scoping review aims to evaluate current scientific evidence for employing social robots in sleep health interventions, identify critical research gaps, and suggest future directions for developing and using social robots to improve people's sleep health. Our analysis of the reviewed studies found them limited due to a singular focus on the older adult population, use of small sample sizes, limited intervention durations, and other compounding factors. Nevertheless, the reviewed studies reported several positive outcomes, highlighting the potential social robots hold in this field. Although our review found limited clinical evidence for the efficacy of social robots as purveyors of sleep health interventions, it did elucidate the potential for a successful future in this domain if current limitations are addressed and more research is conducted.
Designing Social Robots that Engage Older Adults in Exercise: A Case Study
Mar 07, 2024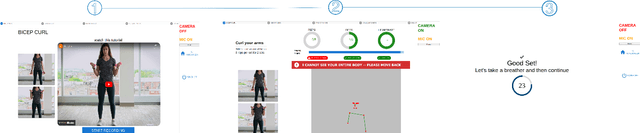

We present and evaluate a prototype social robot to encourage daily exercise among older adults in a home setting. Our prototype system, designed to lead users through exercise sessions with motivational feedback, was assessed through a case study with a 78-year-old participant for one week. Our case study highlighted preferences for greater user control over exercise choices and questioned the necessity of precise motion tracking. Feedback also indicated a desire for more varied exercises and suggested improvements in user engagement techniques. The insights suggest that further research is needed to enhance system adaptability and effectiveness to better promote daily exercise. Future efforts will aim to refine the prototype based on participant feedback and extend the evaluation to broader in-home deployments.