 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Design of On-Body Robots for Older Adults
Feb 04, 2025



Wearable technology has significantly improved the quality of life for older adults, and the emergence of on-body, movable robots presents new opportunities to further enhance well-being. Yet, the interaction design for these robots remains under-explored, particularly from the perspective of older adults. We present findings from a two-phase co-design process involving 13 older adults to uncover design principles for on-body robots for this population. We identify a rich spectrum of potential applications and characterize a design space to inform how on-body robots should be built for older adults. Our findings highlight the importance of considering factors like co-presence, embodiment, and multi-modal communication. Our work offers design insights to facilitate the integration of on-body robots into daily life and underscores the value of involving older adults in the co-design process to promote usability and acceptance of emerging wearable robotic technologies.
The Interaction Flow Editor: A New Human-Robot Interaction RapidPrototyping Interface
Aug 31, 2021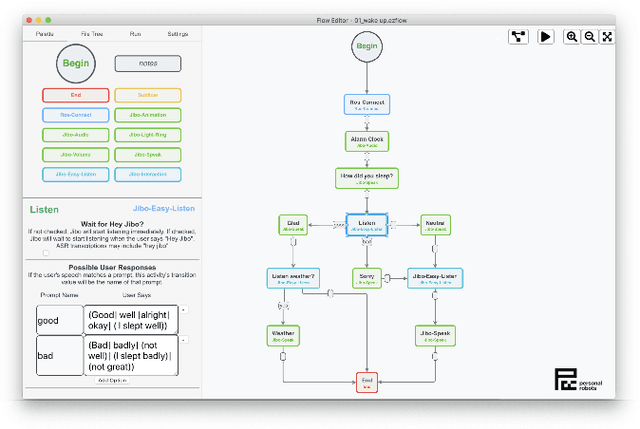


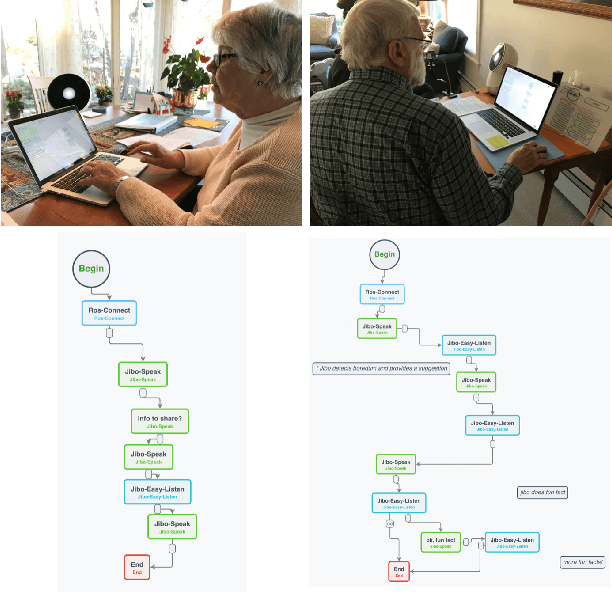
Human-robot interaction can be regarded as a flow between users and robots. Designing good interaction flows takes a lot of effort and needs to be field tested. Unfortunately, the interaction flow design process is often very disjointed, with users experiencing prototypes, designers forming those prototypes, and developers implementing them as independent processes. In this paper, we present the Interaction Flow Editor (IFE), a new human-robot interaction prototyping tool that enables everyday users to create and modify their own interactions, while still providing a full suite of features that is powerful enough for developers and designers to create complex interactions. We also discuss the Flow Engine, a flexible and adaptable framework for executing robot interaction flows authors through the IFE. Finally, we present our case study results that demonstrates how older adults, aged 70 and above, can design and iterate interactions in real-time on a robot using the IFE.