 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerating PDE-Constrained Optimization by the Derivative of Neural Operators
Jun 16, 2025PDE-Constrained Optimization (PDECO) problems can be accelerated significantly by employing gradient-based methods with surrogate models like neural operators compared to traditional numerical solvers. However, this approach faces two key challenges: (1) **Data inefficiency**: Lack of efficient data sampling and effective training for neural operators, particularly for optimization purpose. (2) **Instability**: High risk of optimization derailment due to inaccurate neural operator predictions and gradients. To address these challenges, we propose a novel framework: (1) **Optimization-oriented training**: we leverage data from full steps of traditional optimization algorithms and employ a specialized training method for neural operators. (2) **Enhanced derivative learning**: We introduce a *Virtual-Fourier* layer to enhance derivative learning within the neural operator, a crucial aspect for gradient-based optimization. (3) **Hybrid optimization**: We implement a hybrid approach that integrates neural operators with numerical solvers, providing robust regularization for the optimization process. Our extensive experimental results demonstrate the effectiveness of our model in accurately learning operators and their derivatives. Furthermore, our hybrid optimization approach exhibits robust convergence.
Operator Learning with Domain Decomposition for Geometry Generalization in PDE Solving
Apr 01, 2025Neural operators have become increasingly popular in solving \textit{partial differential equations} (PDEs) due to their superior capability to capture intricate mappings between function spaces over complex domains. However, the data-hungry nature of operator learning inevitably poses a bottleneck for their widespread applications. At the core of the challenge lies the absence of transferability of neural operators to new geometries. To tackle this issue, we propose operator learning with domain decomposition, a local-to-global framework to solve PDEs on arbitrary geometries. Under this framework, we devise an iterative scheme \textit{Schwarz Neural Inference} (SNI). This scheme allows for partitioning of the problem domain into smaller subdomains, on which local problems can be solved with neural operators, and stitching local solutions to construct a global solution. Additionally, we provide a theoretical analysis of the convergence rate and error bound. We conduct extensive experiments on several representative PDEs with diverse boundary conditions and achieve remarkable geometry generalization compared to alternative methods. These analysis and experiments demonstrate the proposed framework's potential in addressing challenges related to geometry generalization and data efficiency.
Reference Neural Operators: Learning the Smooth Dependence of Solutions of PDEs on Geometric Deformations
May 27, 2024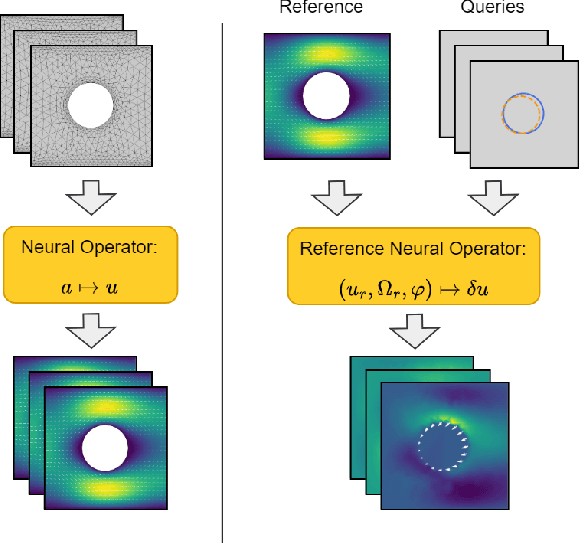
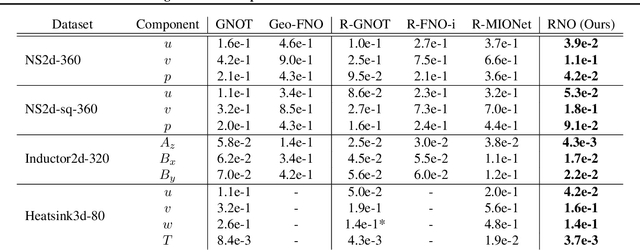
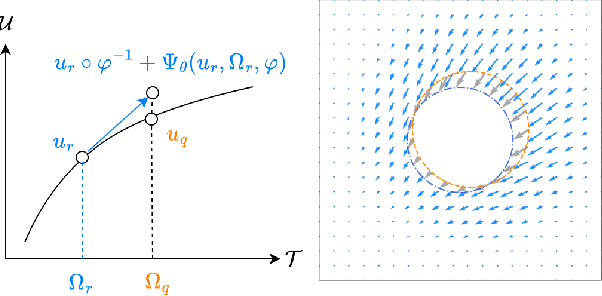

For partial differential equations on domains of arbitrary shapes, existing works of neural operators attempt to learn a mapping from geometries to solutions. It often requires a large dataset of geometry-solution pairs in order to obtain a sufficiently accurate neural operator. However, for many industrial applications, e.g., engineering design optimization, it can be prohibitive to satisfy the requirement since even a single simulation may take hours or days of computation. To address this issue, we propose reference neural operators (RNO), a novel way of implementing neural operators, i.e., to learn the smooth dependence of solutions on geometric deformations. Specifically, given a reference solution, RNO can predict solutions corresponding to arbitrary deformations of the referred geometry. This approach turns out to be much more data efficient. Through extensive experiments, we show that RNO can learn the dependence across various types and different numbers of geometry objects with relatively small datasets. RNO outperforms baseline models in accuracy by a large lead and achieves up to 80% error reduction.