 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Requests in Large-Scale Online P2P Ridesharing
Sep 07, 2020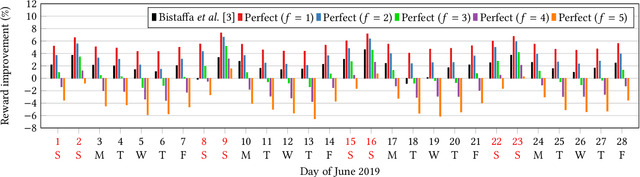
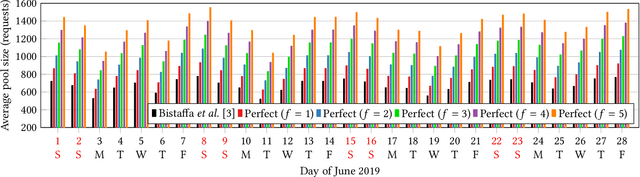

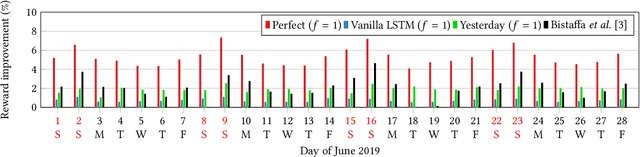
Peer-to-peer ridesharing (P2P-RS) enables people to arrange one-time rides with their own private cars, without the involvement of professional drivers. It is a prominent collective intelligence application producing significant benefits both for individuals (reduced costs) and for the entire community (reduced pollution and traffic), as we showed in a recent publication where we proposed an online approximate solution algorithm for large-scale P2P-RS. In this paper we tackle the fundamental question of assessing the benefit of predicting ridesharing requests in the context of P2P-RS optimisation. Results on a public real-world show that, by employing a perfect predictor, the total reward can be improved by 5.27% with a forecast horizon of 1 minute. On the other hand, a vanilla long short-term memory neural network cannot improve upon a baseline predictor that simply replicates the previous day's requests, whilst achieving an almost-double accuracy.
Dual Stochastic Natural Gradient Descent
Jan 19, 2020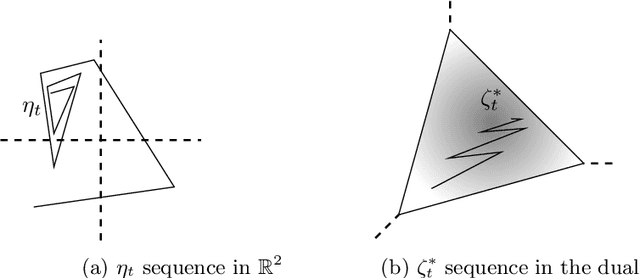
Although theoretically appealing, Stochastic Natural Gradient Descent (SNGD) is computationally expensive, it has been shown to be highly sensitive to the learning rate, and it is not guaranteed to be convergent. Convergent Stochastic Natural Gradient Descent (CSNGD) aims at solving the last two problems. However, the computational expense of CSNGD is still unacceptable when the number of parameters is large. In this paper we introduce the Dual Stochastic Natural Gradient Descent (DSNGD) where we take benefit of dually flat manifolds to obtain a robust alternative to SNGD which is also computationally feasible.
Improving Max-Sum through Decimation to Solve Loopy Distributed Constraint Optimization Problems
Jun 07, 2017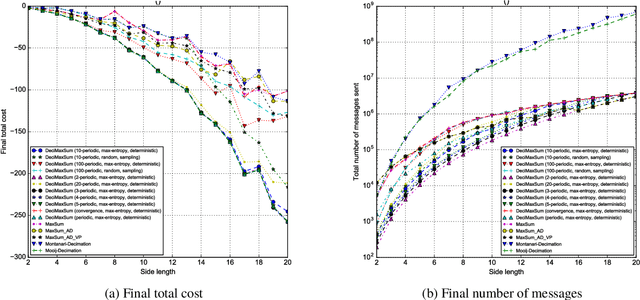
In the context of solving large distributed constraint optimization problems (DCOP), belief-propagation and approximate inference algorithms are candidates of choice. However, in general, when the factor graph is very loopy (i.e. cyclic), these solution methods suffer from bad performance, due to non-convergence and many exchanged messages. As to improve performances of the Max-Sum inference algorithm when solving loopy constraint optimization problems, we propose here to take inspiration from the belief-propagation-guided dec-imation used to solve sparse random graphs (k-satisfiability). We propose the novel DeciMaxSum method, which is parameterized in terms of policies to decide when to trigger decimation, which variables to decimate, and which values to assign to decimated variables. Based on an empirical evaluation on a classical BP benchmark (the Ising model), some of these combinations of policies exhibit better performance than state-of-the-art competitors.
Algorithms for Graph-Constrained Coalition Formation in the Real World
Dec 13, 2016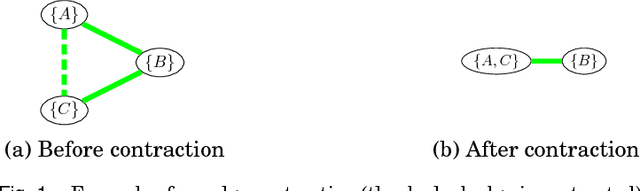
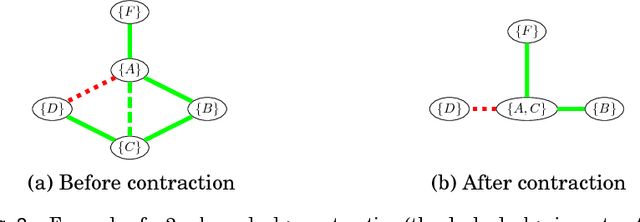
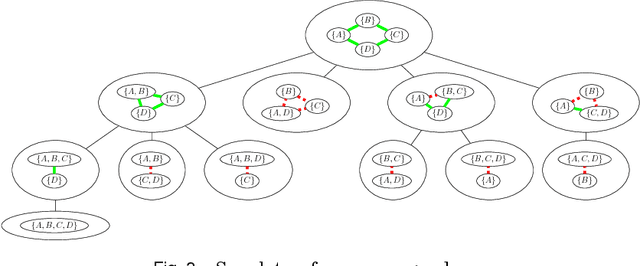
Coalition formation typically involves the coming together of multiple, heterogeneous, agents to achieve both their individual and collective goals. In this paper, we focus on a special case of coalition formation known as Graph-Constrained Coalition Formation (GCCF) whereby a network connecting the agents constrains the formation of coalitions. We focus on this type of problem given that in many real-world applications, agents may be connected by a communication network or only trust certain peers in their social network. We propose a novel representation of this problem based on the concept of edge contraction, which allows us to model the search space induced by the GCCF problem as a rooted tree. Then, we propose an anytime solution algorithm (CFSS), which is particularly efficient when applied to a general class of characteristic functions called $m+a$ functions. Moreover, we show how CFSS can be efficiently parallelised to solve GCCF using a non-redundant partition of the search space. We benchmark CFSS on both synthetic and realistic scenarios, using a real-world dataset consisting of the energy consumption of a large number of households in the UK. Our results show that, in the best case, the serial version of CFSS is 4 orders of magnitude faster than the state of the art, while the parallel version is 9.44 times faster than the serial version on a 12-core machine. Moreover, CFSS is the first approach to provide anytime approximate solutions with quality guarantees for very large systems of agents (i.e., with more than 2700 agents).
* Accepted for publication, cite as "in press"
Sensory Anticipation of Optical Flow in Mobile Robotics
Oct 03, 2012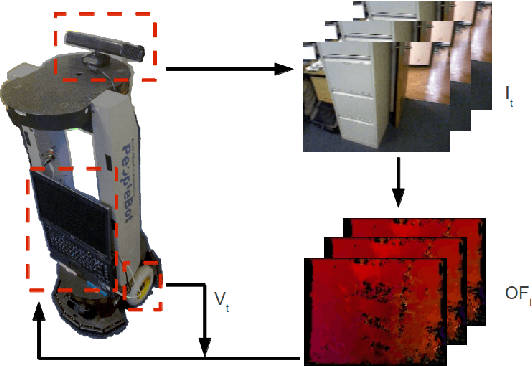
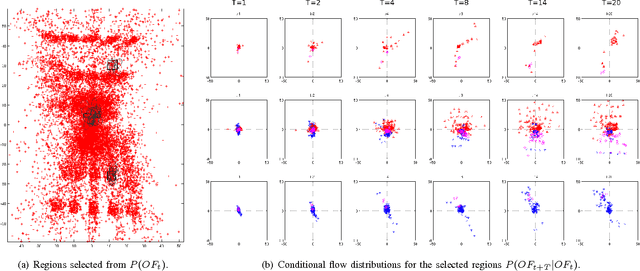
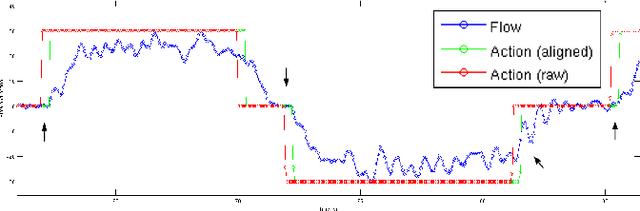
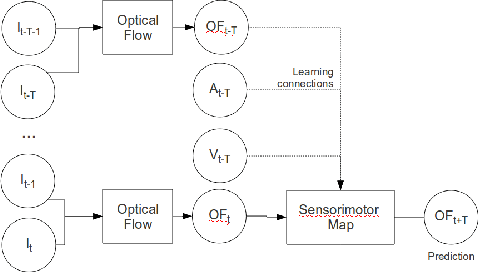
In order to anticipate dangerous events, like a collision, an agent needs to make long-term predictions. However, those are challenging due to uncertainties in internal and external variables and environment dynamics. A sensorimotor model is acquired online by the mobile robot using a state-of-the-art method that learns the optical flow distribution in images, both in space and time. The learnt model is used to anticipate the optical flow up to a given time horizon and to predict an imminent collision by using reinforcement learning. We demonstrate that multi-modal predictions reduce to simpler distributions once actions are taken into account.