Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensory Anticipation of Optical Flow in Mobile Robotics
Oct 03, 2012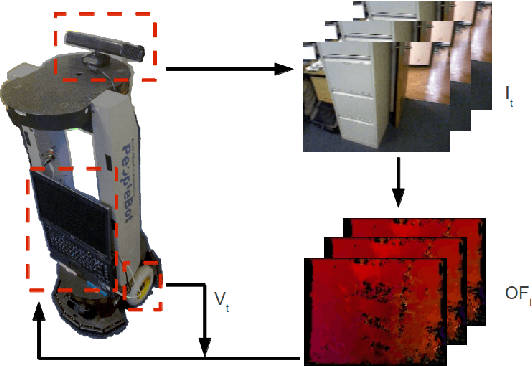
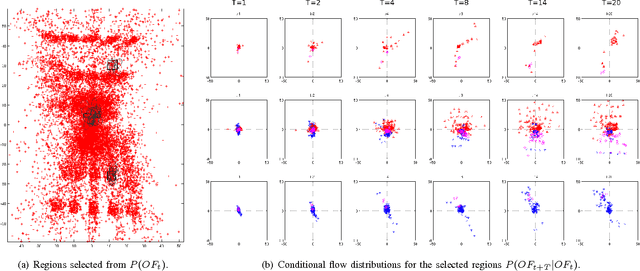
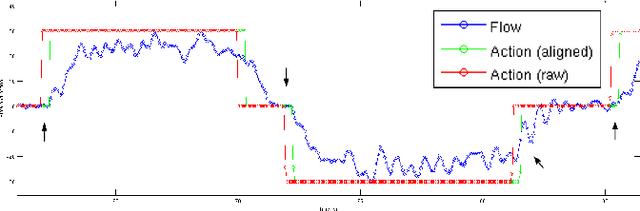
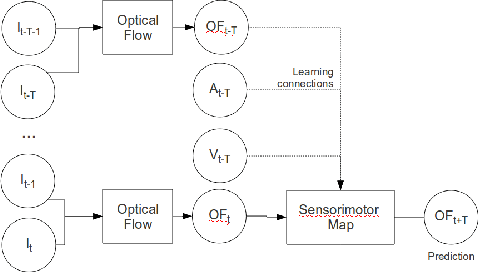
In order to anticipate dangerous events, like a collision, an agent needs to make long-term predictions. However, those are challenging due to uncertainties in internal and external variables and environment dynamics. A sensorimotor model is acquired online by the mobile robot using a state-of-the-art method that learns the optical flow distribution in images, both in space and time. The learnt model is used to anticipate the optical flow up to a given time horizon and to predict an imminent collision by using reinforcement learning. We demonstrate that multi-modal predictions reduce to simpler distributions once actions are taken into account.
Via