 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlgorithms for Graph-Constrained Coalition Formation in the Real World
Paper and Code
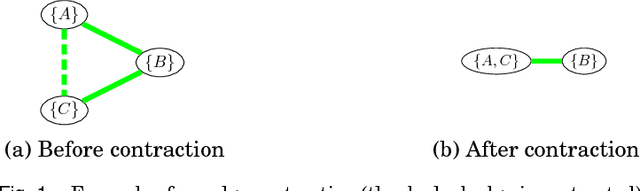
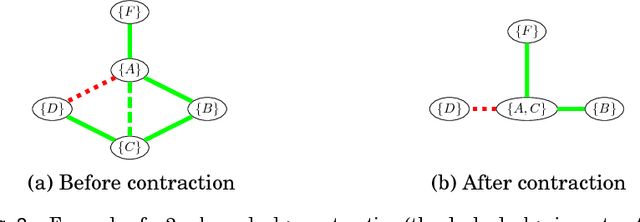
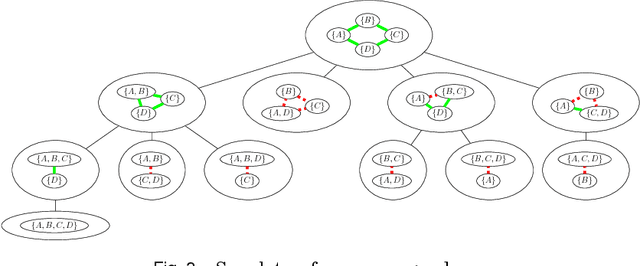
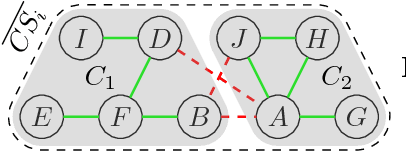
Coalition formation typically involves the coming together of multiple, heterogeneous, agents to achieve both their individual and collective goals. In this paper, we focus on a special case of coalition formation known as Graph-Constrained Coalition Formation (GCCF) whereby a network connecting the agents constrains the formation of coalitions. We focus on this type of problem given that in many real-world applications, agents may be connected by a communication network or only trust certain peers in their social network. We propose a novel representation of this problem based on the concept of edge contraction, which allows us to model the search space induced by the GCCF problem as a rooted tree. Then, we propose an anytime solution algorithm (CFSS), which is particularly efficient when applied to a general class of characteristic functions called $m+a$ functions. Moreover, we show how CFSS can be efficiently parallelised to solve GCCF using a non-redundant partition of the search space. We benchmark CFSS on both synthetic and realistic scenarios, using a real-world dataset consisting of the energy consumption of a large number of households in the UK. Our results show that, in the best case, the serial version of CFSS is 4 orders of magnitude faster than the state of the art, while the parallel version is 9.44 times faster than the serial version on a 12-core machine. Moreover, CFSS is the first approach to provide anytime approximate solutions with quality guarantees for very large systems of agents (i.e., with more than 2700 agents).