 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Path Planning via Learning from Demonstrations for Robotic Catheters in Deformable Environments
Feb 01, 2024Navigation through tortuous and deformable vessels using catheters with limited steering capability underscores the need for reliable path planning. State-of-the-art path planners do not fully account for the deformable nature of the environment. This work proposes a robust path planner via a learning from demonstrations method, named Curriculum Generative Adversarial Imitation Learning (C-GAIL). This path planning framework takes into account the interaction between steerable catheters and vessel walls and the deformable property of vessels. In-silico comparative experiments show that the proposed network achieves smaller targeting errors, and a higher success rate, compared to a state-of-the-art approach based on GAIL. The in-vitro validation experiments demonstrate that the path generated by the proposed C-GAIL path planner aligns better with the actual steering capability of the pneumatic artificial muscle-driven catheter utilized in this study. Therefore, the proposed approach can provide enhanced support to the user in navigating the catheter towards the target with greater precision, in contrast to the conventional centerline-following technique. The targeting and tracking errors are 1.26$\pm$0.55mm and 5.18$\pm$3.48mm, respectively. The proposed path planning framework exhibits superior performance in managing uncertainty associated with vessel deformation, thereby resulting in lower tracking errors.
Autonomous Intraluminal Navigation of a Soft Robot using Deep-Learning-based Visual Servoing
Jul 01, 2022
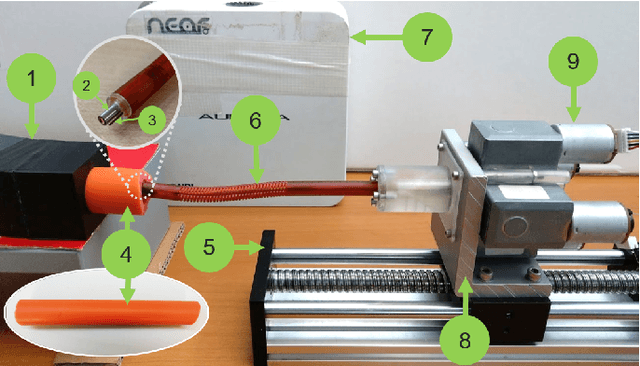
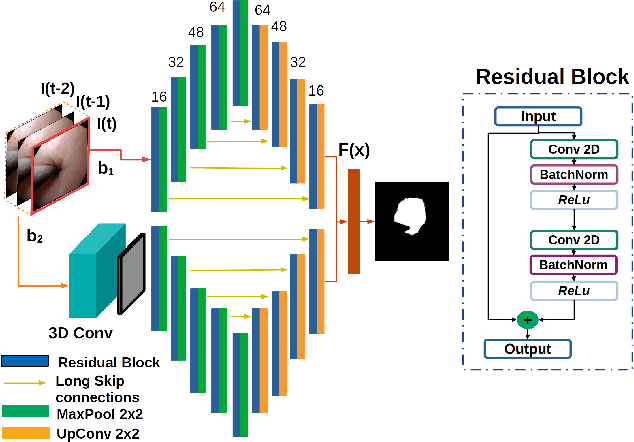
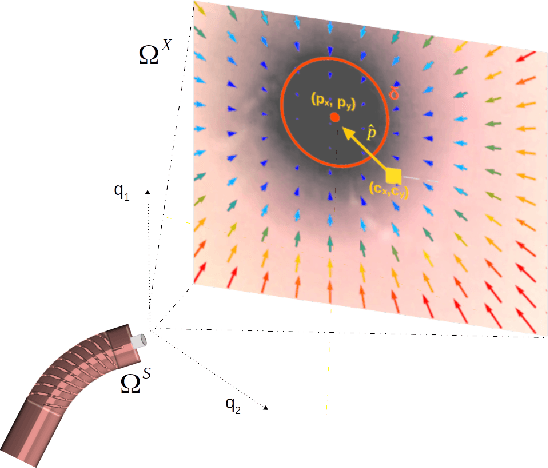
Navigation inside luminal organs is an arduous task that requires non-intuitive coordination between the movement of the operator's hand and the information obtained from the endoscopic video. The development of tools to automate certain tasks could alleviate the physical and mental load of doctors during interventions, allowing them to focus on diagnosis and decision-making tasks. In this paper, we present a synergic solution for intraluminal navigation consisting of a 3D printed endoscopic soft robot that can move safely inside luminal structures. Visual servoing, based on Convolutional Neural Networks (CNNs) is used to achieve the autonomous navigation task. The CNN is trained with phantoms and in-vivo data to segment the lumen, and a model-less approach is presented to control the movement in constrained environments. The proposed robot is validated in anatomical phantoms in different path configurations. We analyze the movement of the robot using different metrics such as task completion time, smoothness, error in the steady-state, and mean and maximum error. We show that our method is suitable to navigate safely in hollow environments and conditions which are different than the ones the network was originally trained on.