 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Evolved Pattern Generators for Optimal Classical Planning
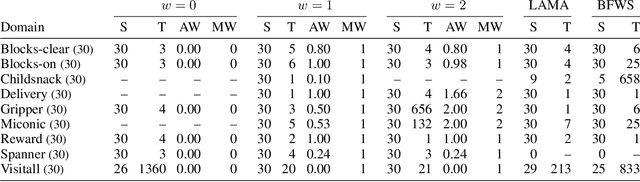
Jun 01, 2026Learned heuristics have recently become a competitive alternative to traditional domain-independent heuristics for satisficing planning. Existing approaches, however, focus on improving search guidance rather than guaranteeing admissibility, which makes them unsuitable for optimal classical planning. We present the first method for learning domain-dependent heuristics that are admissible by design and thus preserve the optimality guarantees of A* search. Instead of learning a direct mapping from states to heuristic values, we learn to construct abstractions that induce admissible heuristics. We use an LLM-driven evolutionary program-synthesis framework to obtain, for each domain, a program that produces a pattern collection for any task in that domain, and we combine the resulting patterns admissibly via saturated cost partitioning. Empirically, the learned programs encode interpretable domain-specific insights, run with negligible overhead at test time and yield heuristics that match the coverage of state-of-the-art domain-independent baselines on several domains while evaluating each state substantially faster.
LLM-Evolved Domain-Independent Heuristics for Symbolic AI Planning
May 28, 2026Heuristic search is the dominant paradigm in symbolic AI planning, and the strongest heuristics are the result of decades of work by planning researchers. Recent work has shown that large language models (LLMs) can design heuristics for individual planning domains, but no LLM-generated heuristic has so far worked on arbitrary planning tasks. In this paper, we use evolutionary search to produce the first LLM-generated domain-independent heuristics that exceed the hand-engineered state of the art. We let an LLM mutate parent heuristics written in C++, store candidates in a MAP-Elites archive keyed on informedness and speed and calculate fitness scores by blending coverage with solving time. To place the evolved programs in context, we additionally benchmark a broad set of hand-engineered heuristics on their informedness-speed tradeoff, which to our knowledge has not been done before. On unseen testing domains, our best evolved heuristic solves more tasks than even the strongest baseline, with our full heuristic suite spanning the Pareto frontier of said tradeoff. We also find that seeding evolution from the trivial blind heuristic outperforms seeding from the strong FF heuristic, even when the resulting program is itself an FF variant, and that LLM reasoning effort affects how often candidates compile much more than the quality of those that do. Because the evolved programs are plain C++, they slot into existing planners as drop-in replacements and inherit the soundness and completeness guarantees of the underlying search.
Dynamic Tree Databases in Automated Planning
Nov 16, 2025A central challenge in scaling up explicit state-space search for large tasks is compactly representing the set of generated states. Tree databases, a data structure from model checking, require constant space per generated state in the best case, but they need a large preallocation of memory. We propose a novel dynamic variant of tree databases for compressing state sets over propositional and numeric variables and prove that it maintains the desirable properties of the static counterpart. Our empirical evaluation of state compression techniques for grounded and lifted planning on classical and numeric planning tasks reveals compression ratios of several orders of magnitude, often with negligible runtime overhead.
The 2025 Planning Performance of Frontier Large Language Models
Nov 12, 2025The capacity of Large Language Models (LLMs) for reasoning remains an active area of research, with the capabilities of frontier models continually advancing. We provide an updated evaluation of the end-to-end planning performance of three frontier LLMs as of 2025, where models are prompted to generate a plan from PDDL domain and task descriptions. We evaluate DeepSeek R1, Gemini 2.5 Pro, GPT-5 and as reference the planner LAMA on a subset of domains from the most recent Learning Track of the International Planning Competition. Our results show that on standard PDDL domains, the performance of GPT-5 in terms of solved tasks is competitive with LAMA. When the PDDL domains and tasks are obfuscated to test for pure reasoning, the performance of all LLMs degrades, though less severely than previously reported for other models. These results show substantial improvements over prior generations of LLMs, reducing the performance gap to planners on a challenging benchmark.
Symmetry-Aware Transformer Training for Automated Planning
Aug 11, 2025While transformers excel in many settings, their application in the field of automated planning is limited. Prior work like PlanGPT, a state-of-the-art decoder-only transformer, struggles with extrapolation from easy to hard planning problems. This in turn stems from problem symmetries: planning tasks can be represented with arbitrary variable names that carry no meaning beyond being identifiers. This causes a combinatorial explosion of equivalent representations that pure transformers cannot efficiently learn from. We propose a novel contrastive learning objective to make transformers symmetry-aware and thereby compensate for their lack of inductive bias. Combining this with architectural improvements, we show that transformers can be efficiently trained for either plan-generation or heuristic-prediction. Our results across multiple planning domains demonstrate that our symmetry-aware training effectively and efficiently addresses the limitations of PlanGPT.
Classical Planning with LLM-Generated Heuristics: Challenging the State of the Art with Python Code
Mar 24, 2025



In recent years, large language models (LLMs) have shown remarkable capabilities in various artificial intelligence problems. However, they fail to plan reliably, even when prompted with a detailed definition of the planning task. Attempts to improve their planning capabilities, such as chain-of-thought prompting, fine-tuning, and explicit "reasoning" still yield incorrect plans and usually fail to generalize to larger tasks. In this paper, we show how to use LLMs to generate correct plans, even for out-of-distribution tasks of increasing size. For a given planning domain, we ask an LLM to generate several domain-dependent heuristic functions in the form of Python code, evaluate them on a set of training tasks within a greedy best-first search, and choose the strongest one. The resulting LLM-generated heuristics solve many more unseen test tasks than state-of-the-art domain-independent heuristics for classical planning. They are even competitive with the strongest learning algorithm for domain-dependent planning. These findings are especially remarkable given that our proof-of-concept implementation is based on an unoptimized Python planner and the baselines all build upon highly optimized C++ code. In some domains, the LLM-generated heuristics expand fewer states than the baselines, revealing that they are not only efficiently computable, but sometimes even more informative than the state-of-the-art heuristics. Overall, our results show that sampling a set of planning heuristic function programs can significantly improve the planning capabilities of LLMs.
NL2Plan: Robust LLM-Driven Planning from Minimal Text Descriptions
May 07, 2024Today's classical planners are powerful, but modeling input tasks in formats such as PDDL is tedious and error-prone. In contrast, planning with Large Language Models (LLMs) allows for almost any input text, but offers no guarantees on plan quality or even soundness. In an attempt to merge the best of these two approaches, some work has begun to use LLMs to automate parts of the PDDL creation process. However, these methods still require various degrees of expert input. We present NL2Plan, the first domain-agnostic offline LLM-driven planning system. NL2Plan uses an LLM to incrementally extract the necessary information from a short text prompt before creating a complete PDDL description of both the domain and the problem, which is finally solved by a classical planner. We evaluate NL2Plan on four planning domains and find that it solves 10 out of 15 tasks - a clear improvement over a plain chain-of-thought reasoning LLM approach, which only solves 2 tasks. Moreover, in two out of the five failure cases, instead of returning an invalid plan, NL2Plan reports that it failed to solve the task. In addition to using NL2Plan in end-to-end mode, users can inspect and correct all of its intermediate results, such as the PDDL representation, increasing explainability and making it an assistive tool for PDDL creation.
Numeric Reward Machines
Apr 30, 2024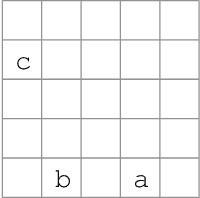
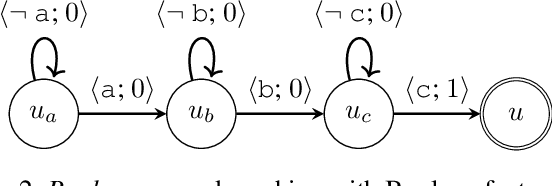
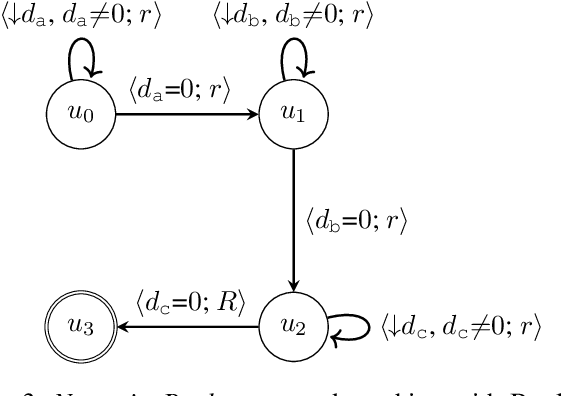
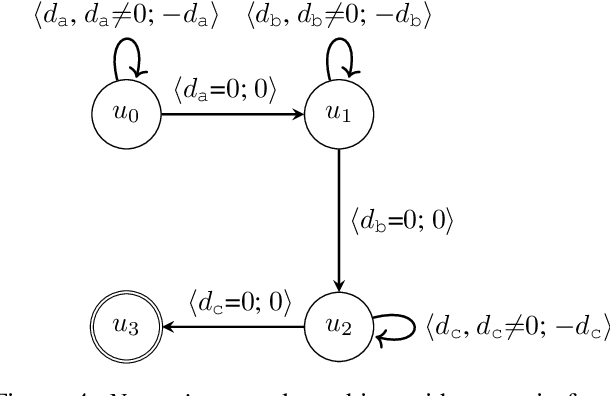
Reward machines inform reinforcement learning agents about the reward structure of the environment and often drastically speed up the learning process. However, reward machines only accept Boolean features such as robot-reached-gold. Consequently, many inherently numeric tasks cannot profit from the guidance offered by reward machines. To address this gap, we aim to extend reward machines with numeric features such as distance-to-gold. For this, we present two types of reward machines: numeric-Boolean and numeric. In a numeric-Boolean reward machine, distance-to-gold is emulated by two Boolean features distance-to-gold-decreased and robot-reached-gold. In a numeric reward machine, distance-to-gold is used directly alongside the Boolean feature robot-reached-gold. We compare our new approaches to a baseline reward machine in the Craft domain, where the numeric feature is the agent-to-target distance. We use cross-product Q-learning, Q-learning with counter-factual experiences, and the options framework for learning. Our experimental results show that our new approaches significantly outperform the baseline approach. Extending reward machines with numeric features opens up new possibilities of using reward machines in inherently numeric tasks.
Consolidating LAMA with Best-First Width Search
Apr 26, 2024One key decision for heuristic search algorithms is how to balance exploration and exploitation. In classical planning, novelty search has come out as the most successful approach in this respect. The idea is to favor states that contain previously unseen facts when searching for a plan. This is done by maintaining a record of the tuples of facts observed in previous states. Then the novelty of a state is the size of the smallest previously unseen tuple. The most successful version of novelty search is best-first width search (BFWS), which combines novelty measures with heuristic estimates. An orthogonal approach to balance exploration-exploitation is to use several open-lists. These open-lists are ordered using different heuristic estimates, which diversify the information used in the search. The search algorithm then alternates between these open-lists, trying to exploit these different estimates. This is the approach used by LAMA, a classical planner that, a decade after its release, is still considered state-of-the-art in agile planning. In this paper, we study how to combine LAMA and BFWS. We show that simply adding the strongest open-list used in BFWS to LAMA harms performance. However, we show that combining only parts of each planner leads to a new state-of-the-art agile planner.
Learning Sketches for Decomposing Planning Problems into Subproblems of Bounded Width: Extended Version
Mar 28, 2022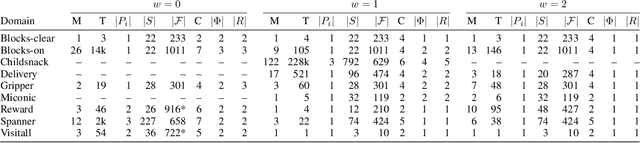
Recently, sketches have been introduced as a general language for representing the subgoal structure of instances drawn from the same domain. Sketches are collections of rules of the form C -> E over a given set of features where C expresses Boolean conditions and E expresses qualitative changes. Each sketch rule defines a subproblem: going from a state that satisfies C to a state that achieves the change expressed by E or a goal state. Sketches can encode simple goal serializations, general policies, or decompositions of bounded width that can be solved greedily, in polynomial time, by the SIW_R variant of the SIW algorithm. Previous work has shown the computational value of sketches over benchmark domains that, while tractable, are challenging for domain-independent planners. In this work, we address the problem of learning sketches automatically given a planning domain, some instances of the target class of problems, and the desired bound on the sketch width. We present a logical formulation of the problem, an implementation using the ASP solver Clingo, and experimental results. The sketch learner and the SIW_R planner yield a domain-independent planner that learns and exploits domain structure in a crisp and explicit form.