 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning-Based Coverage Path Planning with Implicit Cellular Decomposition
Oct 18, 2021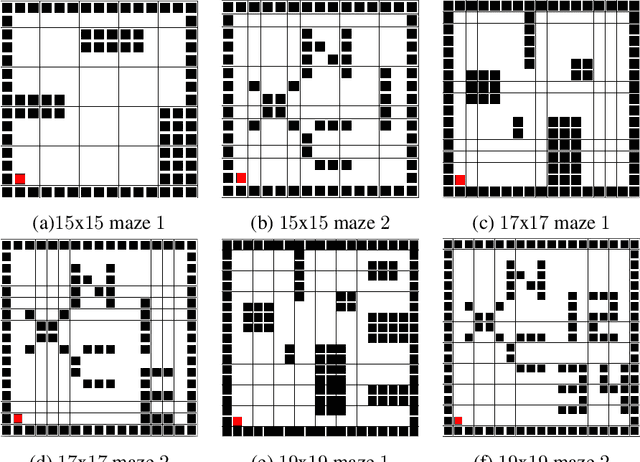
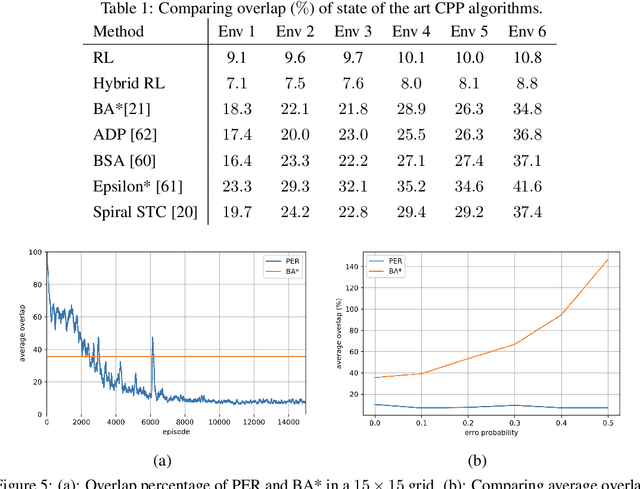
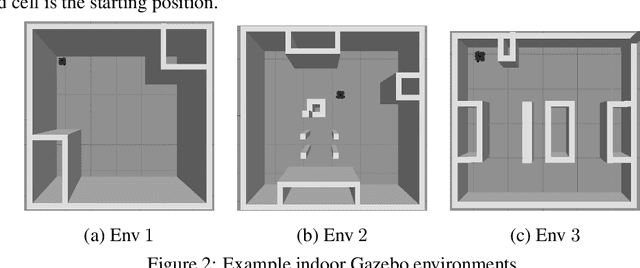
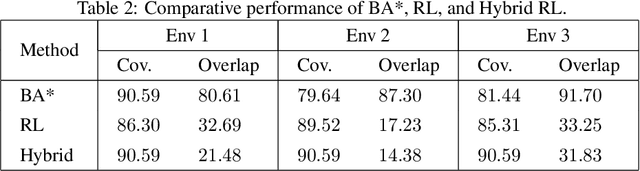
Coverage path planning in a generic known environment is shown to be NP-hard. When the environment is unknown, it becomes more challenging as the robot is required to rely on its online map information built during coverage for planning its path. A significant research effort focuses on designing heuristic or approximate algorithms that achieve reasonable performance. Such algorithms have sub-optimal performance in terms of covering the area or the cost of coverage, e.g., coverage time or energy consumption. In this paper, we provide a systematic analysis of the coverage problem and formulate it as an optimal stopping time problem, where the trade-off between coverage performance and its cost is explicitly accounted for. Next, we demonstrate that reinforcement learning (RL) techniques can be leveraged to solve the problem computationally. To this end, we provide some technical and practical considerations to facilitate the application of the RL algorithms and improve the efficiency of the solutions. Finally, through experiments in grid world environments and Gazebo simulator, we show that reinforcement learning-based algorithms efficiently cover realistic unknown indoor environments, and outperform the current state of the art.
A Survey on Proactive Customer Care: Enabling Science and Steps to Realize it
Oct 11, 2021

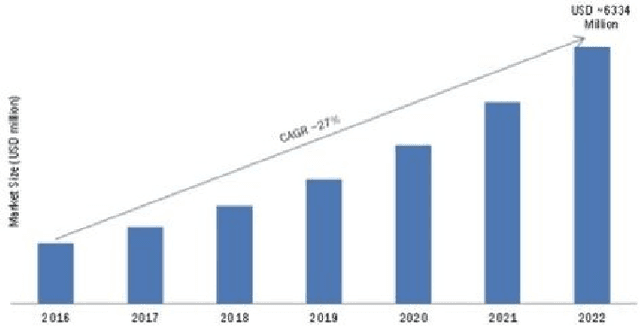
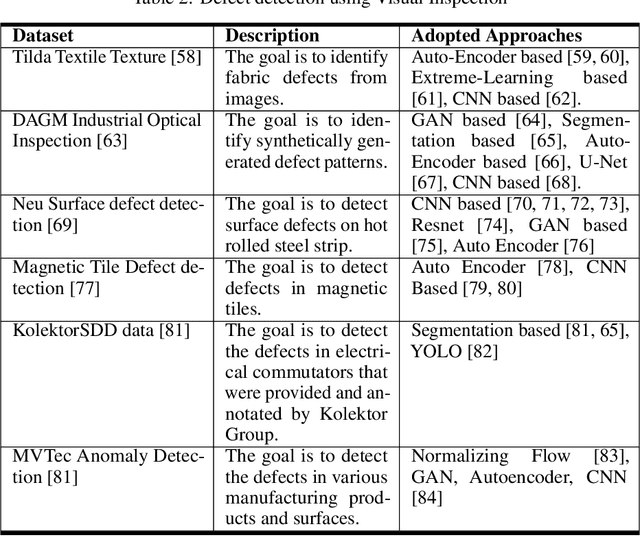
In recent times, advances in artificial intelligence (AI) and IoT have enabled seamless and viable maintenance of appliances in home and building environments. Several studies have shown that AI has the potential to provide personalized customer support which could predict and avoid errors more reliably than ever before. In this paper, we have analyzed the various building blocks needed to enable a successful AI-driven predictive maintenance use-case. Unlike, existing surveys which mostly provide a deep dive into the recent AI algorithms for Predictive Maintenance (PdM), our survey provides the complete view; starting from business impact to recent technology advancements in algorithms as well as systems research and model deployment. Furthermore, we provide exemplar use-cases on predictive maintenance of appliances using publicly available data sets. Our survey can serve as a template needed to design a successful predictive maintenance use-case. Finally, we touch upon existing public data sources and provide a step-wise breakdown of an AI-driven proactive customer care (PCC) use-case, starting from generic anomaly detection to fault prediction and finally root-cause analysis. We highlight how such a step-wise approach can be advantageous for accurate model building and helpful for gaining insights into predictive maintenance of electromechanical appliances.
Evolving GANs: When Contradictions Turn into Compliance
Jun 18, 2021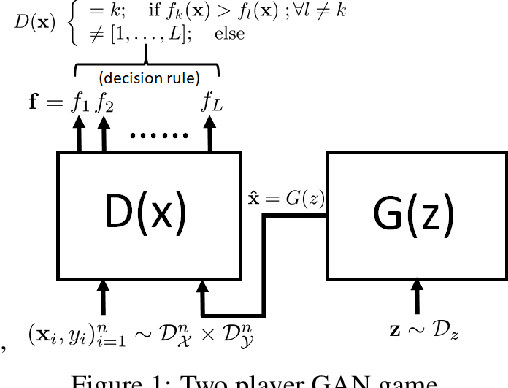
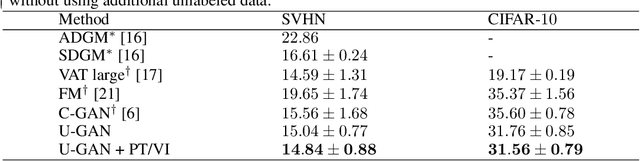
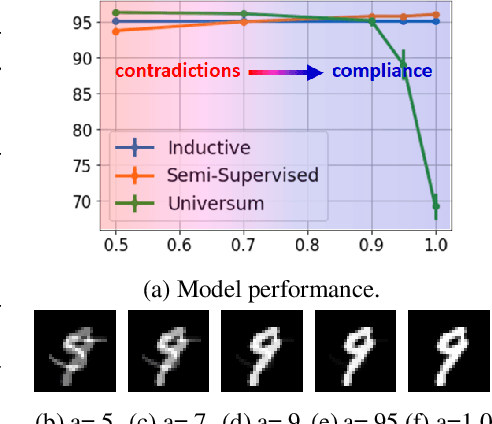

Limited availability of labeled-data makes any supervised learning problem challenging. Alternative learning settings like semi-supervised and universum learning alleviate the dependency on labeled data, but still require a large amount of unlabeled data, which may be unavailable or expensive to acquire. GAN-based synthetic data generation methods have recently shown promise by generating synthetic samples to improve task at hand. However, these samples cannot be used for other purposes. In this paper, we propose a GAN game which provides improved discriminator accuracy under limited data settings, while generating realistic synthetic data. This provides the added advantage that now the generated data can be used for other similar tasks. We provide the theoretical guarantees and empirical results in support of our approach.