 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
Jul 28, 2023We study how vision-language models trained on Internet-scale data can be incorporated directly into end-to-end robotic control to boost generalization and enable emergent semantic reasoning. Our goal is to enable a single end-to-end trained model to both learn to map robot observations to actions and enjoy the benefits of large-scale pretraining on language and vision-language data from the web. To this end, we propose to co-fine-tune state-of-the-art vision-language models on both robotic trajectory data and Internet-scale vision-language tasks, such as visual question answering. In contrast to other approaches, we propose a simple, general recipe to achieve this goal: in order to fit both natural language responses and robotic actions into the same format, we express the actions as text tokens and incorporate them directly into the training set of the model in the same way as natural language tokens. We refer to such category of models as vision-language-action models (VLA) and instantiate an example of such a model, which we call RT-2. Our extensive evaluation (6k evaluation trials) shows that our approach leads to performant robotic policies and enables RT-2 to obtain a range of emergent capabilities from Internet-scale training. This includes significantly improved generalization to novel objects, the ability to interpret commands not present in the robot training data (such as placing an object onto a particular number or icon), and the ability to perform rudimentary reasoning in response to user commands (such as picking up the smallest or largest object, or the one closest to another object). We further show that incorporating chain of thought reasoning allows RT-2 to perform multi-stage semantic reasoning, for example figuring out which object to pick up for use as an improvised hammer (a rock), or which type of drink is best suited for someone who is tired (an energy drink).
Scaling Robot Learning with Semantically Imagined Experience
Feb 22, 2023



Recent advances in robot learning have shown promise in enabling robots to perform a variety of manipulation tasks and generalize to novel scenarios. One of the key contributing factors to this progress is the scale of robot data used to train the models. To obtain large-scale datasets, prior approaches have relied on either demonstrations requiring high human involvement or engineering-heavy autonomous data collection schemes, both of which are challenging to scale. To mitigate this issue, we propose an alternative route and leverage text-to-image foundation models widely used in computer vision and natural language processing to obtain meaningful data for robot learning without requiring additional robot data. We term our method Robot Learning with Semantically Imagened Experience (ROSIE). Specifically, we make use of the state of the art text-to-image diffusion models and perform aggressive data augmentation on top of our existing robotic manipulation datasets via inpainting various unseen objects for manipulation, backgrounds, and distractors with text guidance. Through extensive real-world experiments, we show that manipulation policies trained on data augmented this way are able to solve completely unseen tasks with new objects and can behave more robustly w.r.t. novel distractors. In addition, we find that we can improve the robustness and generalization of high-level robot learning tasks such as success detection through training with the diffusion-based data augmentation. The project's website and videos can be found at diffusion-rosie.github.io
RT-1: Robotics Transformer for Real-World Control at Scale
Dec 13, 2022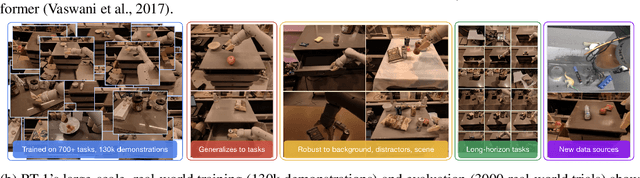
By transferring knowledge from large, diverse, task-agnostic datasets, modern machine learning models can solve specific downstream tasks either zero-shot or with small task-specific datasets to a high level of performance. While this capability has been demonstrated in other fields such as computer vision, natural language processing or speech recognition, it remains to be shown in robotics, where the generalization capabilities of the models are particularly critical due to the difficulty of collecting real-world robotic data. We argue that one of the keys to the success of such general robotic models lies with open-ended task-agnostic training, combined with high-capacity architectures that can absorb all of the diverse, robotic data. In this paper, we present a model class, dubbed Robotics Transformer, that exhibits promising scalable model properties. We verify our conclusions in a study of different model classes and their ability to generalize as a function of the data size, model size, and data diversity based on a large-scale data collection on real robots performing real-world tasks. The project's website and videos can be found at robotics-transformer.github.io