 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4th Workshop on Maritime Computer Vision (MaCVi): Challenge Overview
Apr 14, 2026The 4th Workshop on Maritime Computer Vision (MaCVi) is organized as part of CVPR 2026. This edition features five benchmark challenges with emphasis on both predictive accuracy and embedded real-time feasibility. This report summarizes the MaCVi 2026 challenge setup, evaluation protocols, datasets, and benchmark tracks, and presents quantitative results, qualitative comparisons, and cross-challenge analyses of emerging method trends. We also include technical reports from top-performing teams to highlight practical design choices and lessons learned across the benchmark suite. Datasets, leaderboards, and challenge resources are available at https://macvi.org/workshop/cvpr26.
Graph Structural Residuals: A Learning Approach to Diagnosis
Sep 01, 2023Traditional model-based diagnosis relies on constructing explicit system models, a process that can be laborious and expertise-demanding. In this paper, we propose a novel framework that combines concepts of model-based diagnosis with deep graph structure learning. This data-driven approach leverages data to learn the system's underlying structure and provide dynamic observations, represented by two distinct graph adjacency matrices. Our work facilitates a seamless integration of graph structure learning with model-based diagnosis by making three main contributions: (i) redefining the constructs of system representation, observations, and faults (ii) introducing two distinct versions of a self-supervised graph structure learning model architecture and (iii) demonstrating the potential of our data-driven diagnostic method through experiments on a system of coupled oscillators.
1st Workshop on Maritime Computer Vision 2023: Challenge Results
Nov 28, 2022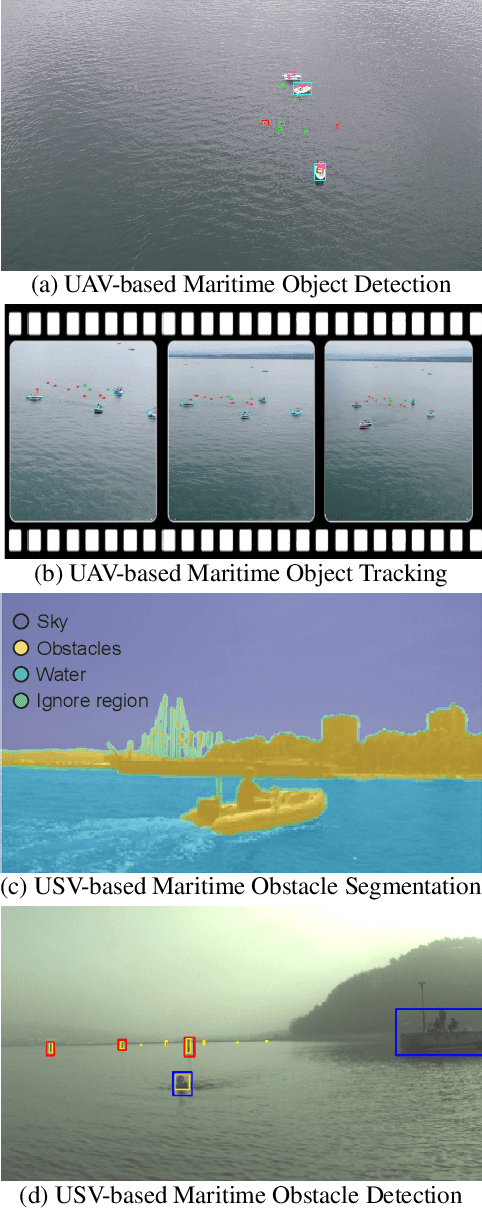
The 1$^{\text{st}}$ Workshop on Maritime Computer Vision (MaCVi) 2023 focused on maritime computer vision for Unmanned Aerial Vehicles (UAV) and Unmanned Surface Vehicle (USV), and organized several subchallenges in this domain: (i) UAV-based Maritime Object Detection, (ii) UAV-based Maritime Object Tracking, (iii) USV-based Maritime Obstacle Segmentation and (iv) USV-based Maritime Obstacle Detection. The subchallenges were based on the SeaDronesSee and MODS benchmarks. This report summarizes the main findings of the individual subchallenges and introduces a new benchmark, called SeaDronesSee Object Detection v2, which extends the previous benchmark by including more classes and footage. We provide statistical and qualitative analyses, and assess trends in the best-performing methodologies of over 130 submissions. The methods are summarized in the appendix. The datasets, evaluation code and the leaderboard are publicly available at https://seadronessee.cs.uni-tuebingen.de/macvi.