 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Solve Abstract Reasoning Problems with Neurosymbolic Program Synthesis and Task Generation
Oct 06, 2024The ability to think abstractly and reason by analogy is a prerequisite to rapidly adapt to new conditions, tackle newly encountered problems by decomposing them, and synthesize knowledge to solve problems comprehensively. We present TransCoder, a method for solving abstract problems based on neural program synthesis, and conduct a comprehensive analysis of decisions made by the generative module of the proposed architecture. At the core of TransCoder is a typed domain-specific language, designed to facilitate feature engineering and abstract reasoning. In training, we use the programs that failed to solve tasks to generate new tasks and gather them in a synthetic dataset. As each synthetic task created in this way has a known associated program (solution), the model is trained on them in supervised mode. Solutions are represented in a transparent programmatic form, which can be inspected and verified. We demonstrate TransCoder's performance using the Abstract Reasoning Corpus dataset, for which our framework generates tens of thousands of synthetic problems with corresponding solutions and facilitates systematic progress in learning.
Navigating by Touch: Haptic Monte Carlo Localization via Geometric Sensing and Terrain Classification
Aug 18, 2021
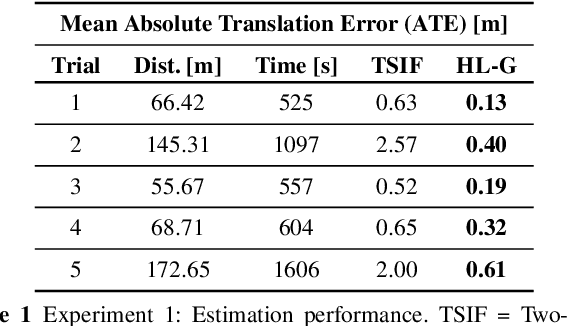
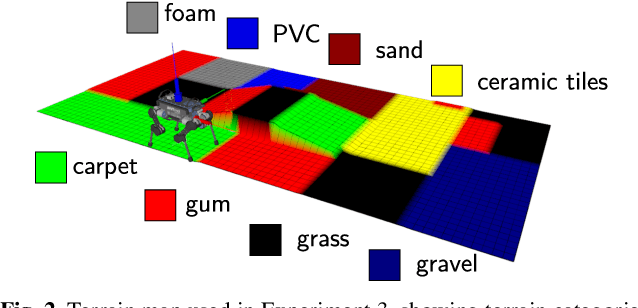
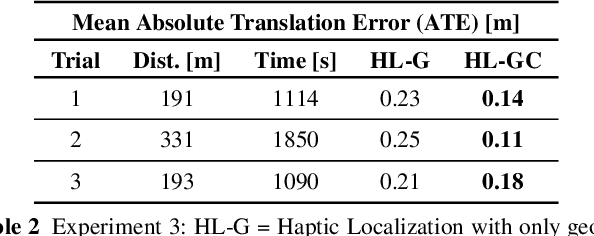
Legged robot navigation in extreme environments can hinder the use of cameras and laser scanners due to darkness, air obfuscation or sensor damage. In these conditions, proprioceptive sensing will continue to work reliably. In this paper, we propose a purely proprioceptive localization algorithm which fuses information from both geometry and terrain class, to localize a legged robot within a prior map. First, a terrain classifier computes the probability that a foot has stepped on a particular terrain class from sensed foot forces. Then, a Monte Carlo-based estimator fuses this terrain class probability with the geometric information of the foot contact points. Results are demonstrated showing this approach operating online and onboard a ANYmal B300 quadruped robot traversing a series of terrain courses with different geometries and terrain types over more than 1.2km. The method keeps the localization error below 20cm using only the information coming from the feet, IMU, and joints of the quadruped.
Gaining a Sense of Touch. Physical Parameters Estimation using a Soft Gripper and Neural Networks
Mar 03, 2020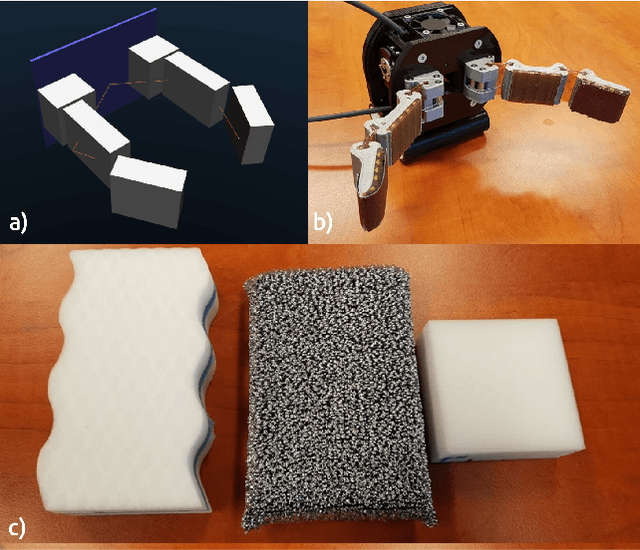


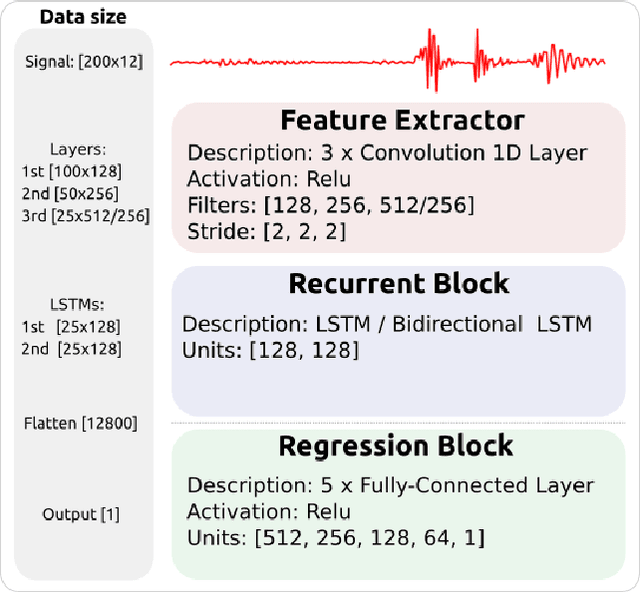
Soft grippers are gaining significant attention in the manipulation of elastic objects, where it is required to handle soft and unstructured objects which are vulnerable to deformations. A crucial problem is to estimate the physical parameters of a squeezed object to adjust the manipulation procedure, which is considered as a significant challenge. To the best of the authors' knowledge, there is not enough research on physical parameters estimation using deep learning algorithms on measurements from direct interaction with objects using robotic grippers. In our work, we proposed a trainable system for the regression of a stiffness coefficient and provided extensive experiments using the physics simulator environment. Moreover, we prepared the application that works in the real-world scenario. Our system can reliably estimate the stiffness of an object using the Yale OpenHand soft gripper based on readings from Inertial Measurement Units (IMUs) attached to its fingers. Additionally, during the experiments, we prepared three datasets of signals gathered while squeezing objects -- two created in the simulation environment and one composed of real data.
Ain't Nobody Got Time For Coding: Structure-Aware Program Synthesis From Natural Language
Oct 23, 2018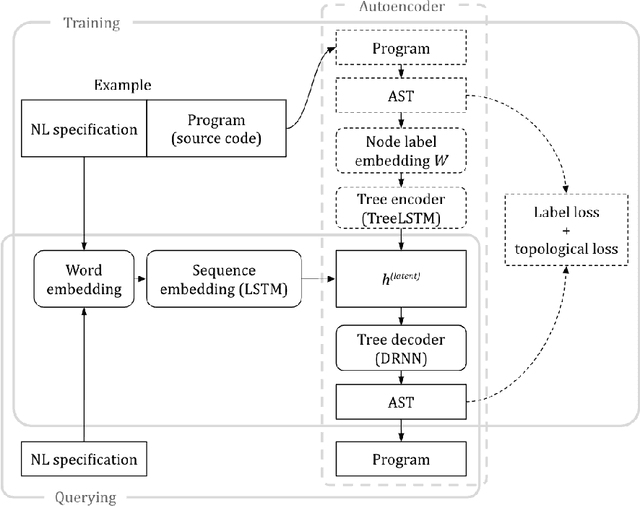


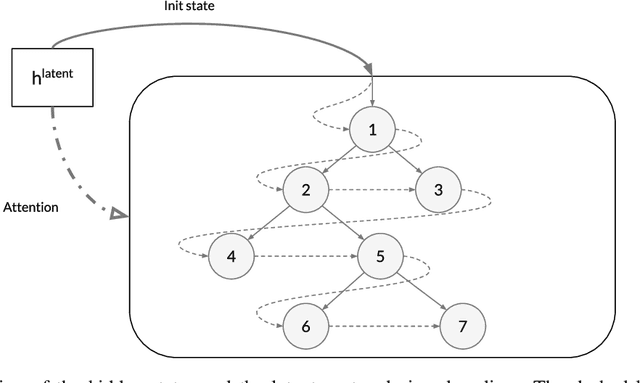
Program synthesis from natural language (NL) is practical for humans and, once technically feasible, would significantly facilitate software development and revolutionize end-user programming. We present SAPS, an end-to-end neural network capable of mapping relatively complex, multi-sentence NL specifications to snippets of executable code. The proposed architecture relies exclusively on neural components, and is built upon a tree2tree autoencoder trained on abstract syntax trees, combined with a pretrained word embedding and a bi-directional multi-layer LSTM for NL processing. The decoder features a doubly-recurrent LSTM with a novel signal propagation scheme and soft attention mechanism. When applied to a large dataset of problems proposed in a previous study, SAPS performs on par with or better than the method proposed there, producing correct programs in over 90% of cases. In contrast to other methods, it does not involve any non-neural components to post-process the resulting programs, and uses a fixed-dimensional latent representation as the only link between the NL analyzer and source code generator.