 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaining a Sense of Touch. Physical Parameters Estimation using a Soft Gripper and Neural Networks
Mar 03, 2020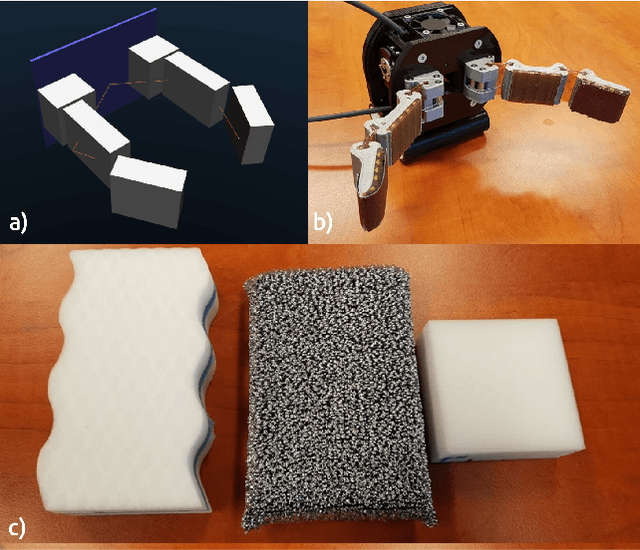


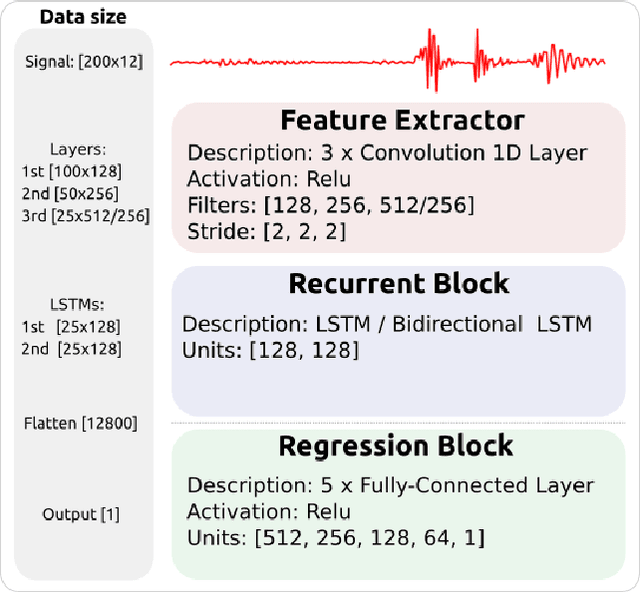
Soft grippers are gaining significant attention in the manipulation of elastic objects, where it is required to handle soft and unstructured objects which are vulnerable to deformations. A crucial problem is to estimate the physical parameters of a squeezed object to adjust the manipulation procedure, which is considered as a significant challenge. To the best of the authors' knowledge, there is not enough research on physical parameters estimation using deep learning algorithms on measurements from direct interaction with objects using robotic grippers. In our work, we proposed a trainable system for the regression of a stiffness coefficient and provided extensive experiments using the physics simulator environment. Moreover, we prepared the application that works in the real-world scenario. Our system can reliably estimate the stiffness of an object using the Yale OpenHand soft gripper based on readings from Inertial Measurement Units (IMUs) attached to its fingers. Additionally, during the experiments, we prepared three datasets of signals gathered while squeezing objects -- two created in the simulation environment and one composed of real data.