 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Variational Message Passing Framework for Multi-Sensor Multi-Object Tracking using Raw Radar Signals
Apr 15, 2026The growing proliferation of unmanned aerial vehicles (UAVs) poses major challenges for reliable airspace surveillance, as drones are typically small, have low radar cross-sections, and often move slowly in cluttered environments. These characteristics make the joint tasks of detecting, localizing, and tracking multiple objects difficult for conventional detect-then-track (DTT) approaches, which rely on pre-processed measurements and may discard informative low-signal-to-noise ratio (SNR) signal components. To overcome these limitations, we propose a variational message passing (VMP)-based direct multiobject tracking (MOT) method that operates directly on raw radar signals and explicitly accounts for an unknown and time-varying number of objects. The proposed method is formulated for MIMO multi-radar systems and performs data fusion by jointly processing the signals of all radar sensors using a probabilistic model. A superimposed signal model is employed to capture correlations in the raw sensor data caused by closely spaced objects, and a hierarchical Bernoulli-Gamma model is introduced to jointly model object existence, reflectivities, and the reliability of individual radar-object links. Using a mean-field approximation, we derive message updates, yielding a computationally efficient VMP algorithm that simultaneously performs object detection, track formation, state estimation, and nuisance parameter learning directly from the radar signal. Simulation results in synthetic scenarios with weak and closely-spaced objects show that the proposed direct-MOT method outperforms a conventional pipeline based on super-resolution estimation followed by belief propagation (BP)-based tracking, particularly in low-SNR and clutter-rich conditions, demonstrating the advantages of direct signal-level inference and coherent multi-radar fusion.
Variational Message Passing-based Multiobject Tracking for MIMO-Radars using Raw Sensor Signals
Mar 19, 2025



In this paper, we propose a direct multiobject tracking (MOT) approach for MIMO-radar signals that operates on raw sensor data via variational message passing (VMP). Unlike classical track-before-detect (TBD) methods, which often rely on simplified likelihood models and exclude nuisance parameters (e.g., object amplitudes, noise variance), our method adopts a superimposed signal model and employs a mean-field approximation to jointly estimate both object existence and object states. By considering correlations within in the radar signal due to closely spaced objects and jointly estimating nuisance parameters, the proposed method achieves robust performance for close-by objects and in low-signal-to-noise ratio (SNR) regimes. Our numerical evaluation based on MIMO-radar signals demonstrate that our VMP-based direct-MOT method outperforms a detect-then-track (DTT) pipeline comprising a super-resolution sparse Bayesian learning (SBL)-based estimation stage followed by classical MOT using global nearest neighbour data association and a Kalman filter.
A Block-Sparse Bayesian Learning Algorithm with Dictionary Parameter Estimation for Multi-Sensor Data Fusion
Mar 17, 2025We propose an sparse Bayesian learning (SBL)-based method that leverages group sparsity and multiple parameterized dictionaries to detect the relevant dictionary entries and estimate their continuous parameters by combining data from multiple independent sensors. In a MIMO multi-radar setup, we demonstrate its effectiveness in jointly detecting and localizing multiple objects, while also emphasizing its broader applicability to various signal processing tasks. A key benefit of the proposed SBL-based method is its ability to resolve correlated dictionary entries-such as closely spaced objects-resulting in uncorrelated estimates that improve subsequent estimation stages. Through numerical simulations, we show that our method outperforms the newtonized orthogonal matching pursuit (NOMP) algorithm when two objects cross paths using a single radar. Furthermore, we illustrate how fusing measurements from multiple independent radars leads to enhanced detection and localization performance
"UWBCarGraz" Dataset for Car Occupancy Detection using Ultra-Wideband Radar
Nov 17, 2023



We present a data-driven car occupancy detection algorithm using ultra-wideband radar based on the ResNet architecture. The algorithm is trained on a dataset of channel impulse responses obtained from measurements at three different activity levels of the occupants (i.e. breathing, talking, moving). We compare the presented algorithm against a state-of-the-art car occupancy detection algorithm based on variational message passing (VMP). Our presented ResNet architecture is able to outperform the VMP algorithm in terms of the area under the receiver operating curve (AUC) at low signal-to-noise ratios (SNRs) for all three activity levels of the target. Specifically, for an SNR of -20 dB the VMP detector achieves an AUC of 0.87 while the ResNet architecture achieves an AUC of 0.91 if the target is sitting still and breathing naturally. The difference in performance for the other activities is similar. To facilitate the implementation in the onboard computer of a car we perform an ablation study to optimize the tradeoff between performance and computational complexity for several ResNet architectures. The dataset used to train and evaluate the algorithm is openly accessible. This facilitates an easy comparison in future works.
Fast Variational Block-Sparse Bayesian Learning
Jun 01, 2023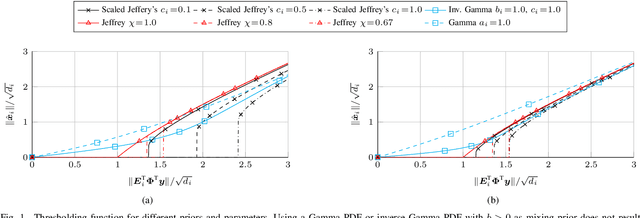
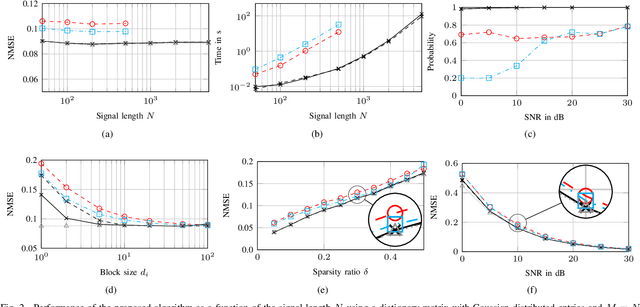
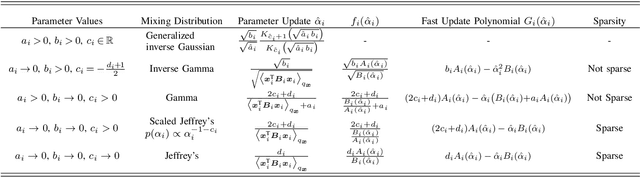
We present a fast update rule for variational block-sparse Bayesian learning (SBL) methods. Using a variational Bayesian framework, we show how repeated updates of probability density functions (PDFs) of the prior variances and weights can be expressed as a nonlinear first-order recurrence from one estimate of the parameters of the proxy PDFs to the next. Specifically, the recurrent relation turns out to be a strictly increasing rational function for many commonly used prior PDFs of the variances, such as Jeffrey's prior. Hence, the fixed points of this recurrent relation can be obtained by solving for the roots of a polynomial. This scheme allows to check for convergence/divergence of individual prior variances in a single step. Thereby, the the computational complexity of the variational block-SBL algorithm is reduced and the convergence speed is improved by two orders of magnitude in our simulations. Furthermore, the solution allows insights into the sparsity of the estimators obtained by choosing different priors.
Variational Inference of Structured Line Spectra Exploiting Group-Sparsity
Mar 06, 2023



In this paper, we present a variational inference algorithm that decomposes a signal into multiple groups of related spectral lines. The spectral lines in each group are associated with a group parameter common to all spectral lines within the group. The proposed algorithm jointly estimates the group parameters, the number of spetral lines within a group, and the number of groups exploiting a Bernoulli-Gamma-Gaussian hierarchical prior model which promotes sparse solutions. Aiming to maximize the evidence lower bound (ELBO), variational inference provides analytic approximations of the posterior probability density functions (PDFs) and also gives estimates of the additional model parameters such as the measurement noise variance. While the activation variables of the groups and the associated group parameters (such as fundamental frequencies and the corresponding higher order harmonics) are estimated as point estimates, the remaining parameters such as the complex amplitudes of the spectral lines and their precision parameters are estimated as approximate posterior PDFs. We demonstrate the versatility and performance of the proposed algorithm on three different inference problems. In particular, the proposed algorithm is applied to the multi-pitch estimation problem, the radar signal-based extended object estimation problem, and variational mode decomposition (VMD) using synthetic measurements and to real multi-pitch estimation problem using the Bach-10 dataset. The results show that the proposed algorithm outperforms state-of-the-art model-based and pre-trained algorithms on all three inference problems.
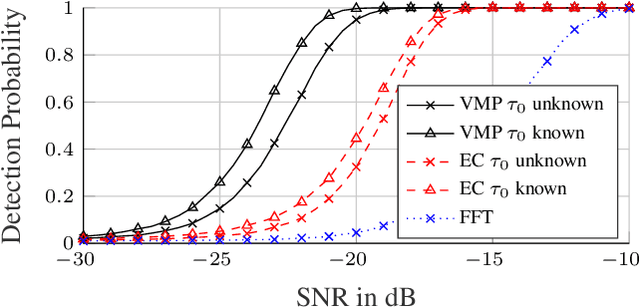
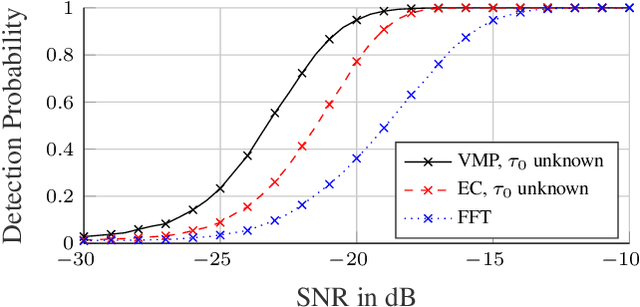
Variational Message Passing-based Respiratory Motion Estimation and Detection Using Radar Signals
Oct 14, 2022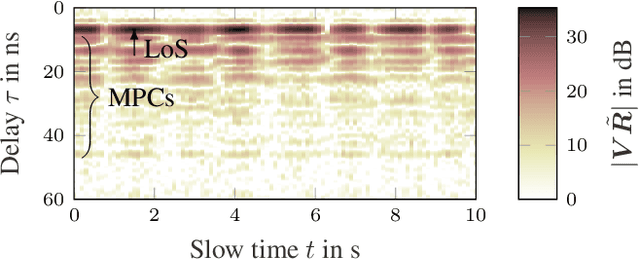
We present a variational message passing (VMP) approach to detect the presence of a person based on their respiratory chest motion using ultra-wideband (UWB) radar and to estimate the respiratory motion for contact-free vital sign monitoring. The received signal is modeled by a backscatter channel. The respiratory motion and propagation channel are estimated using VMP, while the presence of a person is detected by the evidence lower bound (ELBO). Numerical analyses and measurements demonstrate that the proposed method leads to a significant improvement in the detection performance compared to a fast fourier transform (FFT)-based detector or an estimator-correlator, since the multipath components (MPCs) are better incorporated into the detection procedure. Specifically, the proposed method has a detection probability of 0.95 at -20 dB signal-to-noise ratio (SNR), while the estimator-correlator and FFT-based detector have 0.32 and 0.05, respectively.