 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Bayesian Estimation of Low Earth Orbits for Satellite Communication
Oct 31, 2025Low-earth-orbit (LEO) satellite communication systems that use millimeter-wave frequencies rely on large antenna arrays with hybrid analog-digital architectures for rapid beam steering. LEO satellites are only visible from the ground for short periods of times (a few tens of minutes) due to their high orbital speeds. This paper presents a variational message passing algorithm for joint localization and beam tracking of a LEO satellite from a ground station equipped with a hybrid transceiver architecture. The algorithm relies on estimating the parameters of the orbit, which is modelled as circular. Angles are then obtained from the orbit in a straightforward manner. Simulation results show that the proposed method is highly resilient to missed detections, enables reliable satellite tracking even near the horizon, and effectively alleviates the ambiguities inherent in hybrid architectures.
Clutter Tracking using Variational Message Passing
Mar 24, 2025


We propose a message passing algorithm for tracking of clutter signals in MIMO radar. The method exploits basis expansion to linearise the signal model, to enable mean field approach for tracking the posterior distribution of the clutter as it evolves across time, as well as the mean and precision of the clutter map. The method shows good estimation accuracy in simulations for a scenario that adhere to the statistical model used for derivation as well as one that does not. The complexity of the method is linear in both the amount of parameters chosen and the amount of data under consideration.
Distributed Algorithm for Cooperative Joint Localization and Tracking Using Multiple-Input Multiple-Output Radars
Mar 20, 2025

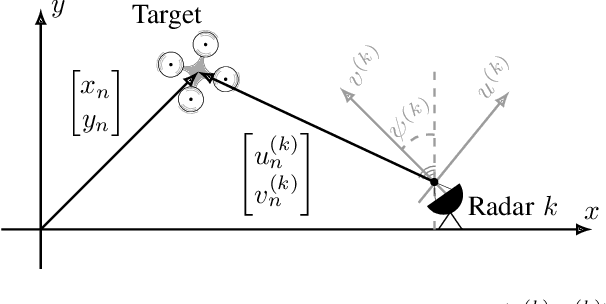

We propose a distributed joint localization and tracking algorithm using a message passing framework, for multiple-input multiple-output radars. We employ the mean field approach to derive an iterative algorithm. The obtained algorithm features a small communication overhead that scales linearly with the number of radars in the system. The proposed algorithm shows good estimation accuracy in two simulated scenarios even below 0 dB signal to noise ratio. In both cases the ground truth falls within the 95 % confidence interval of the estimated posterior for the majority of the track.
Variational Message Passing-based Multiobject Tracking for MIMO-Radars using Raw Sensor Signals
Mar 19, 2025



In this paper, we propose a direct multiobject tracking (MOT) approach for MIMO-radar signals that operates on raw sensor data via variational message passing (VMP). Unlike classical track-before-detect (TBD) methods, which often rely on simplified likelihood models and exclude nuisance parameters (e.g., object amplitudes, noise variance), our method adopts a superimposed signal model and employs a mean-field approximation to jointly estimate both object existence and object states. By considering correlations within in the radar signal due to closely spaced objects and jointly estimating nuisance parameters, the proposed method achieves robust performance for close-by objects and in low-signal-to-noise ratio (SNR) regimes. Our numerical evaluation based on MIMO-radar signals demonstrate that our VMP-based direct-MOT method outperforms a detect-then-track (DTT) pipeline comprising a super-resolution sparse Bayesian learning (SBL)-based estimation stage followed by classical MOT using global nearest neighbour data association and a Kalman filter.