Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Algorithm for Cooperative Joint Localization and Tracking Using Multiple-Input Multiple-Output Radars
Mar 20, 2025

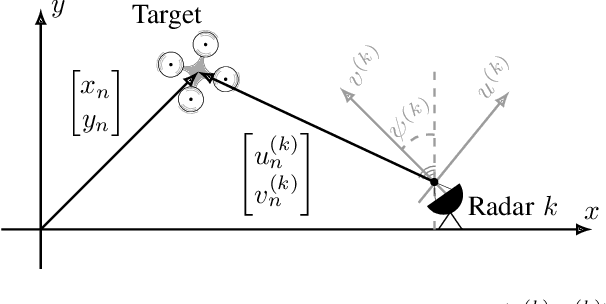

We propose a distributed joint localization and tracking algorithm using a message passing framework, for multiple-input multiple-output radars. We employ the mean field approach to derive an iterative algorithm. The obtained algorithm features a small communication overhead that scales linearly with the number of radars in the system. The proposed algorithm shows good estimation accuracy in two simulated scenarios even below 0 dB signal to noise ratio. In both cases the ground truth falls within the 95 % confidence interval of the estimated posterior for the majority of the track.
Via