 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
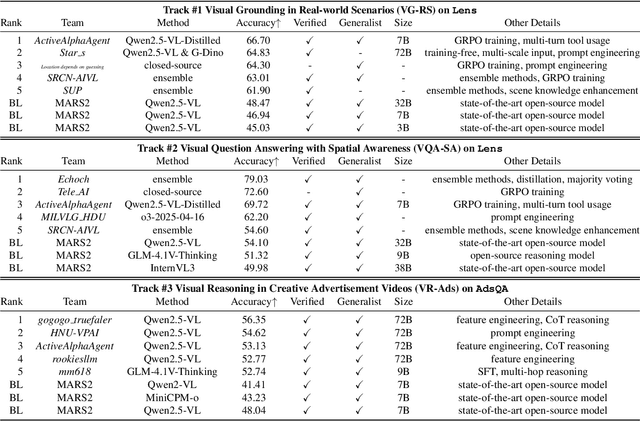

This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
OmniSplat: Taming Feed-Forward 3D Gaussian Splatting for Omnidirectional Images with Editable Capabilities
Dec 21, 2024



Feed-forward 3D Gaussian Splatting (3DGS) models have gained significant popularity due to their ability to generate scenes immediately without needing per-scene optimization. Although omnidirectional images are getting more popular since they reduce the computation for image stitching to composite a holistic scene, existing feed-forward models are only designed for perspective images. The unique optical properties of omnidirectional images make it difficult for feature encoders to correctly understand the context of the image and make the Gaussian non-uniform in space, which hinders the image quality synthesized from novel views. We propose OmniSplat, a pioneering work for fast feed-forward 3DGS generation from a few omnidirectional images. We introduce Yin-Yang grid and decompose images based on it to reduce the domain gap between omnidirectional and perspective images. The Yin-Yang grid can use the existing CNN structure as it is, but its quasi-uniform characteristic allows the decomposed image to be similar to a perspective image, so it can exploit the strong prior knowledge of the learned feed-forward network. OmniSplat demonstrates higher reconstruction accuracy than existing feed-forward networks trained on perspective images. Furthermore, we enhance the segmentation consistency between omnidirectional images by leveraging attention from the encoder of OmniSplat, providing fast and clean 3DGS editing results.
ODGS: 3D Scene Reconstruction from Omnidirectional Images with 3D Gaussian Splattings
Oct 28, 2024Omnidirectional (or 360-degree) images are increasingly being used for 3D applications since they allow the rendering of an entire scene with a single image. Existing works based on neural radiance fields demonstrate successful 3D reconstruction quality on egocentric videos, yet they suffer from long training and rendering times. Recently, 3D Gaussian splatting has gained attention for its fast optimization and real-time rendering. However, directly using a perspective rasterizer to omnidirectional images results in severe distortion due to the different optical properties between two image domains. In this work, we present ODGS, a novel rasterization pipeline for omnidirectional images, with geometric interpretation. For each Gaussian, we define a tangent plane that touches the unit sphere and is perpendicular to the ray headed toward the Gaussian center. We then leverage a perspective camera rasterizer to project the Gaussian onto the corresponding tangent plane. The projected Gaussians are transformed and combined into the omnidirectional image, finalizing the omnidirectional rasterization process. This interpretation reveals the implicit assumptions within the proposed pipeline, which we verify through mathematical proofs. The entire rasterization process is parallelized using CUDA, achieving optimization and rendering speeds 100 times faster than NeRF-based methods. Our comprehensive experiments highlight the superiority of ODGS by delivering the best reconstruction and perceptual quality across various datasets. Additionally, results on roaming datasets demonstrate that ODGS restores fine details effectively, even when reconstructing large 3D scenes. The source code is available on our project page (https://github.com/esw0116/ODGS).
DeblurGS: Gaussian Splatting for Camera Motion Blur
Apr 18, 2024Although significant progress has been made in reconstructing sharp 3D scenes from motion-blurred images, a transition to real-world applications remains challenging. The primary obstacle stems from the severe blur which leads to inaccuracies in the acquisition of initial camera poses through Structure-from-Motion, a critical aspect often overlooked by previous approaches. To address this challenge, we propose DeblurGS, a method to optimize sharp 3D Gaussian Splatting from motion-blurred images, even with the noisy camera pose initialization. We restore a fine-grained sharp scene by leveraging the remarkable reconstruction capability of 3D Gaussian Splatting. Our approach estimates the 6-Degree-of-Freedom camera motion for each blurry observation and synthesizes corresponding blurry renderings for the optimization process. Furthermore, we propose Gaussian Densification Annealing strategy to prevent the generation of inaccurate Gaussians at erroneous locations during the early training stages when camera motion is still imprecise. Comprehensive experiments demonstrate that our DeblurGS achieves state-of-the-art performance in deblurring and novel view synthesis for real-world and synthetic benchmark datasets, as well as field-captured blurry smartphone videos.
Depth-Regularized Optimization for 3D Gaussian Splatting in Few-Shot Images
Dec 04, 2023In this paper, we present a method to optimize Gaussian splatting with a limited number of images while avoiding overfitting. Representing a 3D scene by combining numerous Gaussian splats has yielded outstanding visual quality. However, it tends to overfit the training views when only a small number of images are available. To address this issue, we introduce a dense depth map as a geometry guide to mitigate overfitting. We obtained the depth map using a pre-trained monocular depth estimation model and aligning the scale and offset using sparse COLMAP feature points. The adjusted depth aids in the color-based optimization of 3D Gaussian splatting, mitigating floating artifacts, and ensuring adherence to geometric constraints. We verify the proposed method on the NeRF-LLFF dataset with varying numbers of few images. Our approach demonstrates robust geometry compared to the original method that relies solely on images. Project page: robot0321.github.io/DepthRegGS
LucidDreamer: Domain-free Generation of 3D Gaussian Splatting Scenes
Nov 23, 2023



With the widespread usage of VR devices and contents, demands for 3D scene generation techniques become more popular. Existing 3D scene generation models, however, limit the target scene to specific domain, primarily due to their training strategies using 3D scan dataset that is far from the real-world. To address such limitation, we propose LucidDreamer, a domain-free scene generation pipeline by fully leveraging the power of existing large-scale diffusion-based generative model. Our LucidDreamer has two alternate steps: Dreaming and Alignment. First, to generate multi-view consistent images from inputs, we set the point cloud as a geometrical guideline for each image generation. Specifically, we project a portion of point cloud to the desired view and provide the projection as a guidance for inpainting using the generative model. The inpainted images are lifted to 3D space with estimated depth maps, composing a new points. Second, to aggregate the new points into the 3D scene, we propose an aligning algorithm which harmoniously integrates the portions of newly generated 3D scenes. The finally obtained 3D scene serves as initial points for optimizing Gaussian splats. LucidDreamer produces Gaussian splats that are highly-detailed compared to the previous 3D scene generation methods, with no constraint on domain of the target scene. Project page: https://luciddreamer-cvlab.github.io/
MEIL-NeRF: Memory-Efficient Incremental Learning of Neural Radiance Fields
Dec 31, 2022



Hinged on the representation power of neural networks, neural radiance fields (NeRF) have recently emerged as one of the promising and widely applicable methods for 3D object and scene representation. However, NeRF faces challenges in practical applications, such as large-scale scenes and edge devices with a limited amount of memory, where data needs to be processed sequentially. Under such incremental learning scenarios, neural networks are known to suffer catastrophic forgetting: easily forgetting previously seen data after training with new data. We observe that previous incremental learning algorithms are limited by either low performance or memory scalability issues. As such, we develop a Memory-Efficient Incremental Learning algorithm for NeRF (MEIL-NeRF). MEIL-NeRF takes inspiration from NeRF itself in that a neural network can serve as a memory that provides the pixel RGB values, given rays as queries. Upon the motivation, our framework learns which rays to query NeRF to extract previous pixel values. The extracted pixel values are then used to train NeRF in a self-distillation manner to prevent catastrophic forgetting. As a result, MEIL-NeRF demonstrates constant memory consumption and competitive performance.