 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLINT: Modeling Scene-Scale Transparency via Gaussian Radiance Transport
Mar 27, 2026While 3D Gaussian splatting has emerged as a powerful paradigm, it fundamentally fails to model transparency such as glass panels. The core challenge lies in decoupling the intertwined radiance contributions from transparent interfaces and the transmitted geometry observed through the glass. We present GLINT, a framework that models scene-scale transparency through explicit decomposed Gaussian representation. GLINT reconstructs the primary interface and models reflected and transmitted radiance separately, enabling consistent radiance transport. During optimization, GLINT bootstraps transparency localization from geometry-separation cues induced by the decomposition, together with geometry and material priors from a pre-trained video relighting model. Extensive experiments demonstrate consistent improvements over prior methods for reconstructing complex transparent scenes.
Mode-GS: Monocular Depth Guided Anchored 3D Gaussian Splatting for Robust Ground-View Scene Rendering
Oct 06, 2024We present a novel-view rendering algorithm, Mode-GS, for ground-robot trajectory datasets. Our approach is based on using anchored Gaussian splats, which are designed to overcome the limitations of existing 3D Gaussian splatting algorithms. Prior neural rendering methods suffer from severe splat drift due to scene complexity and insufficient multi-view observation, and can fail to fix splats on the true geometry in ground-robot datasets. Our method integrates pixel-aligned anchors from monocular depths and generates Gaussian splats around these anchors using residual-form Gaussian decoders. To address the inherent scale ambiguity of monocular depth, we parameterize anchors with per-view depth-scales and employ scale-consistent depth loss for online scale calibration. Our method results in improved rendering performance, based on PSNR, SSIM, and LPIPS metrics, in ground scenes with free trajectory patterns, and achieves state-of-the-art rendering performance on the R3LIVE odometry dataset and the Tanks and Temples dataset.
A Single Correspondence Is Enough: Robust Global Registration to Avoid Degeneracy in Urban Environments
Mar 13, 2022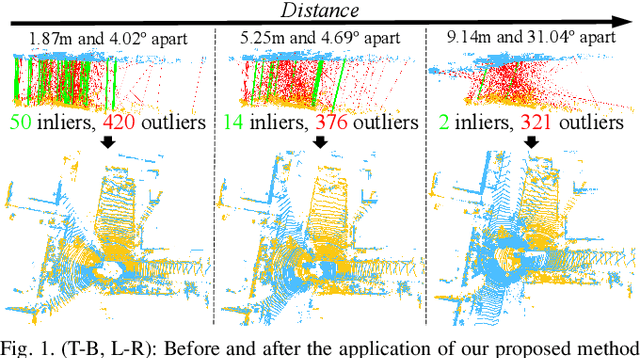
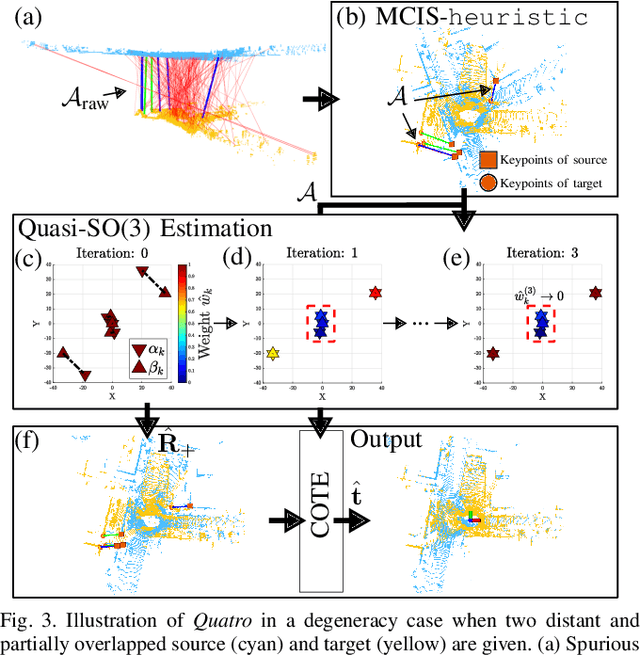
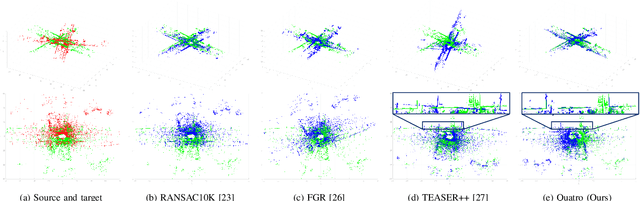
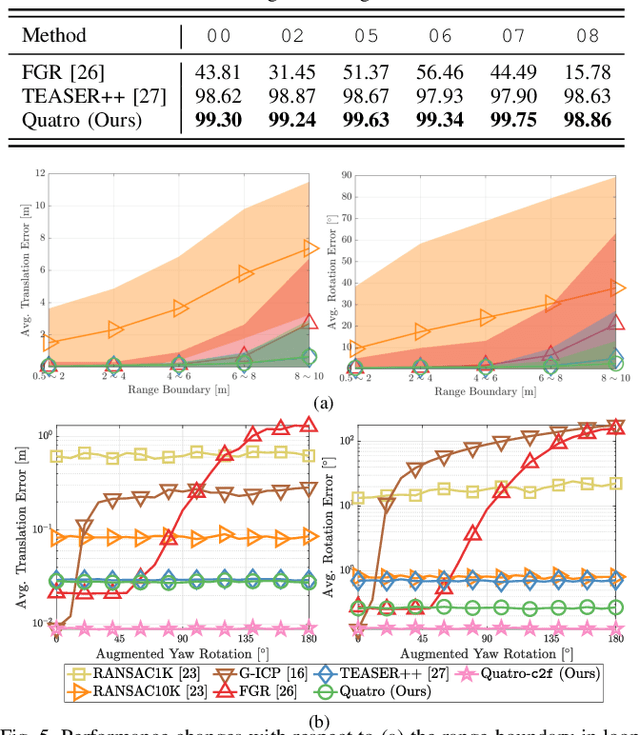
Global registration using 3D point clouds is a crucial technology for mobile platforms to achieve localization or manage loop-closing situations. In recent years, numerous researchers have proposed global registration methods to address a large number of outlier correspondences. Unfortunately, the degeneracy problem, which represents the phenomenon in which the number of estimated inliers becomes lower than three, is still potentially inevitable. To tackle the problem, a degeneracy-robust decoupling-based global registration method is proposed, called Quatro. In particular, our method employs quasi-SO(3) estimation by leveraging the Atlanta world assumption in urban environments to avoid degeneracy in rotation estimation. Thus, the minimum degree of freedom (DoF) of our method is reduced from three to one. As verified in indoor and outdoor 3D LiDAR datasets, our proposed method yields robust global registration performance compared with other global registration methods, even for distant point cloud pairs. Furthermore, the experimental results confirm the applicability of our method as a coarse alignment. Our code is available: https://github.com/url-kaist/quatro.