 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHilbert geometry of the symmetric positive-definite bicone: Application to the geometry of the extended Gaussian family
Aug 20, 2025The extended Gaussian family is the closure of the Gaussian family obtained by completing the Gaussian family with the counterpart elements induced by degenerate covariance or degenerate precision matrices, or a mix of both degeneracies. The parameter space of the extended Gaussian family forms a symmetric positive semi-definite matrix bicone, i.e. two partial symmetric positive semi-definite matrix cones joined at their bases. In this paper, we study the Hilbert geometry of such an open bounded convex symmetric positive-definite bicone. We report the closed-form formula for the corresponding Hilbert metric distance and study exhaustively its invariance properties. We also touch upon potential applications of this geometry for dealing with extended Gaussian distributions.
Characterizing stable regions in the residual stream of LLMs
Sep 26, 2024
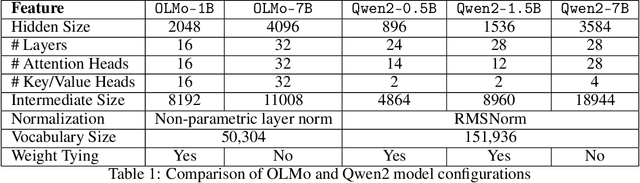


We identify "stable regions" in the residual stream of Transformers, where the model's output remains insensitive to small activation changes, but exhibits high sensitivity at region boundaries. These regions emerge during training and become more defined as training progresses or model size increases. The regions appear to be much larger than previously studied polytopes. Our analysis suggests that these stable regions align with semantic distinctions, where similar prompts cluster within regions, and activations from the same region lead to similar next token predictions. This work provides a promising research direction for understanding the complexity of neural networks, shedding light on training dynamics, and advancing interpretability.
Limitations of Agents Simulated by Predictive Models
Feb 08, 2024There is increasing focus on adapting predictive models into agent-like systems, most notably AI assistants based on language models. We outline two structural reasons for why these models can fail when turned into agents. First, we discuss auto-suggestive delusions. Prior work has shown theoretically that models fail to imitate agents that generated the training data if the agents relied on hidden observations: the hidden observations act as confounding variables, and the models treat actions they generate as evidence for nonexistent observations. Second, we introduce and formally study a related, novel limitation: predictor-policy incoherence. When a model generates a sequence of actions, the model's implicit prediction of the policy that generated those actions can serve as a confounding variable. The result is that models choose actions as if they expect future actions to be suboptimal, causing them to be overly conservative. We show that both of those failures are fixed by including a feedback loop from the environment, that is, re-training the models on their own actions. We give simple demonstrations of both limitations using Decision Transformers and confirm that empirical results agree with our conceptual and formal analysis. Our treatment provides a unifying view of those failure modes, and informs the question of why fine-tuning offline learned policies with online learning makes them more effective.
Goodhart's Law in Reinforcement Learning
Oct 13, 2023Implementing a reward function that perfectly captures a complex task in the real world is impractical. As a result, it is often appropriate to think of the reward function as a proxy for the true objective rather than as its definition. We study this phenomenon through the lens of Goodhart's law, which predicts that increasing optimisation of an imperfect proxy beyond some critical point decreases performance on the true objective. First, we propose a way to quantify the magnitude of this effect and show empirically that optimising an imperfect proxy reward often leads to the behaviour predicted by Goodhart's law for a wide range of environments and reward functions. We then provide a geometric explanation for why Goodhart's law occurs in Markov decision processes. We use these theoretical insights to propose an optimal early stopping method that provably avoids the aforementioned pitfall and derive theoretical regret bounds for this method. Moreover, we derive a training method that maximises worst-case reward, for the setting where there is uncertainty about the true reward function. Finally, we evaluate our early stopping method experimentally. Our results support a foundation for a theoretically-principled study of reinforcement learning under reward misspecification.