 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Robot Autonomy for Long-Horizon Tasks
Jul 24, 2023



Autonomous robots have real-world applications in diverse fields, such as mobile manipulation and environmental exploration, and many such tasks benefit from a hands-off approach in terms of human user involvement over a long task horizon. However, the level of autonomy achievable by a deployment is limited in part by the problem definition or task specification required by the system. Task specifications often require technical, low-level information that is unintuitive to describe and may result in generic solutions, burdening the user technically both before and after task completion. In this thesis, we aim to advance task specification abstraction toward the goal of increasing robot autonomy in real-world scenarios. We do so by tackling problems that address several different angles of this goal. First, we develop a way for the automatic discovery of optimal transition points between subtasks in the context of constrained mobile manipulation, removing the need for the human to hand-specify these in the task specification. We further propose a way to automatically describe constraints on robot motion by using demonstrated data as opposed to manually-defined constraints. Then, within the context of environmental exploration, we propose a flexible task specification framework, requiring just a set of quantiles of interest from the user that allows the robot to directly suggest locations in the environment for the user to study. We next systematically study the effect of including a robot team in the task specification and show that multirobot teams have the ability to improve performance under certain specification conditions, including enabling inter-robot communication. Finally, we propose methods for a communication protocol that autonomously selects useful but limited information to share with the other robots.
Reducing Network Load via Message Utility Estimation for Decentralized Multirobot Teams
Apr 14, 2023We are motivated by quantile estimation of algae concentration in lakes. We find that multirobot teams improve performance in this task over single robots, and communication-enabled teams further over communication-deprived teams; however, real robots are resource-constrained, and communication networks cannot support arbitrary message loads, making na\"ive, constant information-sharing but also complex modeling and decision-making infeasible. With this in mind, we propose online, locally computable metrics for determining the utility of transmitting a given message to the other team members and a decision-theoretic approach that chooses to transmit only the most useful messages, using a decentralized and independent framework for maintaining beliefs of other teammates. We validate our approach in simulation on a real-world aquatic dataset, and show that restricting communication via a utility estimation method based on the expected impact of a message on future teammate behavior results in a 44% decrease in network load while increasing quantile estimation error by only 2.16%.
A Study on Multirobot Quantile Estimation in Natural Environments
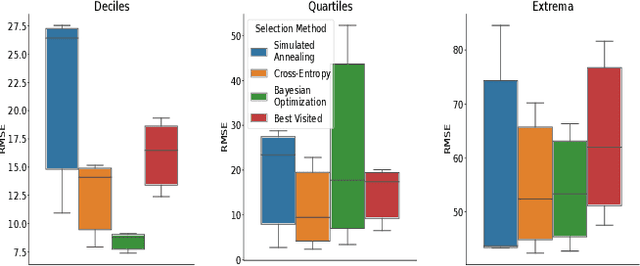
Mar 06, 2023Quantiles of a natural phenomena can provide scientists with an important understanding of typical, extreme, or other spreads of concentrations. When a group has several available robots, or teams of scientists come together to study a particular environment, it may be advantageous to pool robot resources in a collaborative way to improve performance. A multirobot team can be difficult to practically bring together and coordinate, especially when robot communication is involved. To this end, we present a study across several axes of the impact of using multiple robots to estimate quantiles of a distribution of interest using an informative path planning formulation. We measure quantile estimation accuracy with increasing team size to understand what benefits result from a multirobot approach in a drone exploration task of analyzing the algae concentration in lakes. We additionally perform an analysis on several parameters, including the spread of robot initial positions, the planning budget, and inter-robot communication, and find that while using more robots generally results in lower estimation error, this benefit is achieved under certain conditions. We present our findings in the context of real field robotic applications and discuss the implications of the results and interesting directions for future work.
Adaptive Sampling to Estimate Quantiles for Guiding Physical Sampling
Jan 25, 2022
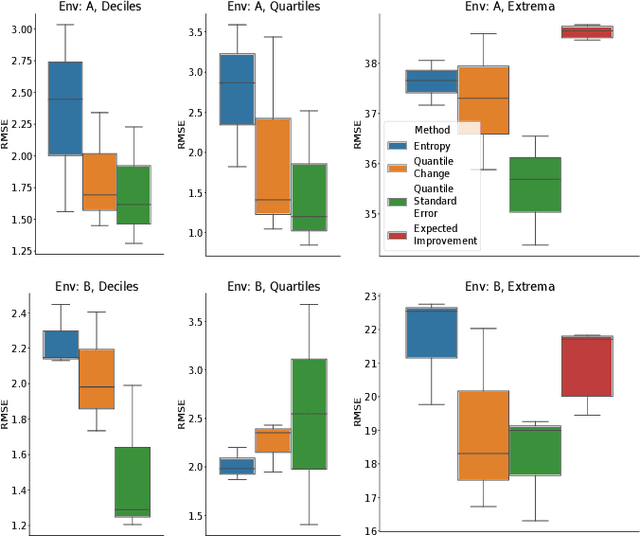
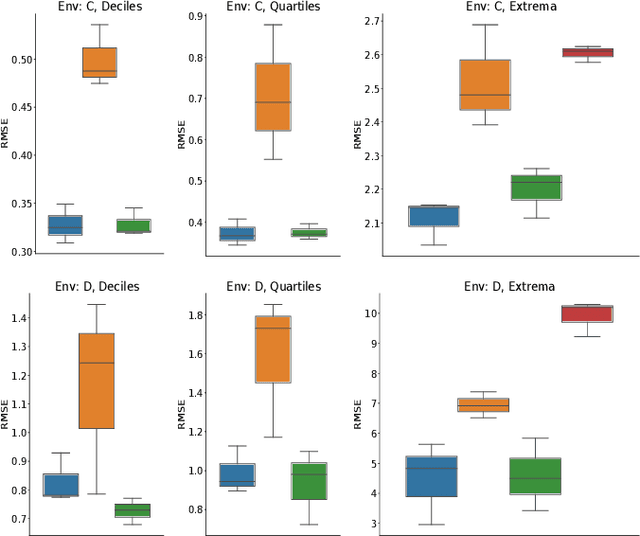
Scientists interested in studying natural phenomena often take physical samples for later analysis at locations specified by expert heuristics. Instead, we propose to guide scientists' physical sampling by using a robot to perform an adaptive sampling survey to find locations to suggest that correspond to the quantile values of pre-specified quantiles of interest. We develop a robot planner using novel objective functions to improve the estimates of the quantile values over time and an approach to find locations which correspond to the quantile values. We demonstrate our approach on two different sampling tasks in simulation using previously collected aquatic data and validate it in a field trial. Our approach outperforms objectives that maximize spatial coverage or find extrema in planning and is able to localize the quantile spatial locations.
Learning Equality Constraints for Motion Planning on Manifolds
Sep 24, 2020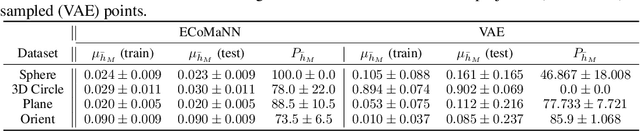
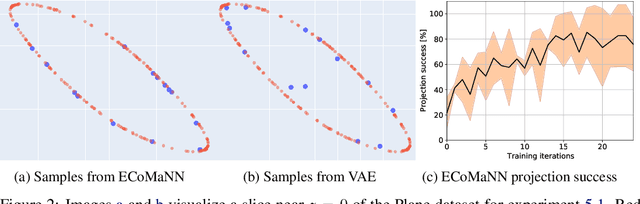
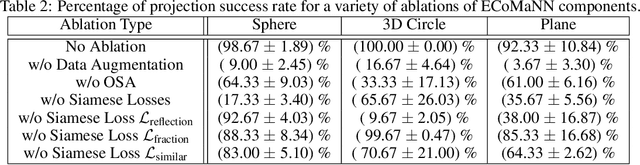
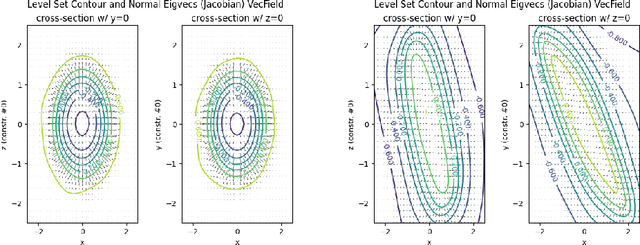
Constrained robot motion planning is a widely used technique to solve complex robot tasks. We consider the problem of learning representations of constraints from demonstrations with a deep neural network, which we call Equality Constraint Manifold Neural Network (ECoMaNN). The key idea is to learn a level-set function of the constraint suitable for integration into a constrained sampling-based motion planner. Learning proceeds by aligning subspaces in the network with subspaces of the data. We combine both learned constraints and analytically described constraints into the planner and use a projection-based strategy to find valid points. We evaluate ECoMaNN on its representation capabilities of constraint manifolds, the impact of its individual loss terms, and the motions produced when incorporated into a planner.
Learning Manifolds for Sequential Motion Planning
Jul 04, 2020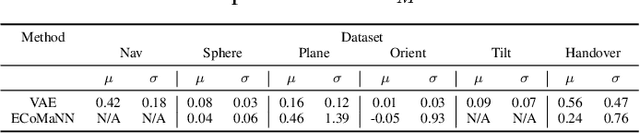

Motion planning with constraints is an important part of many real-world robotic systems. In this work, we study manifold learning methods to learn such constraints from data. We explore two methods for learning implicit constraint manifolds from data: Variational Autoencoders (VAE), and a new method, Equality Constraint Manifold Neural Network (ECoMaNN). With the aim of incorporating learned constraints into a sampling-based motion planning framework, we evaluate the approaches on their ability to learn representations of constraints from various datasets and on the quality of paths produced during planning.
Sampling-Based Motion Planning on Manifold Sequences
Jun 03, 2020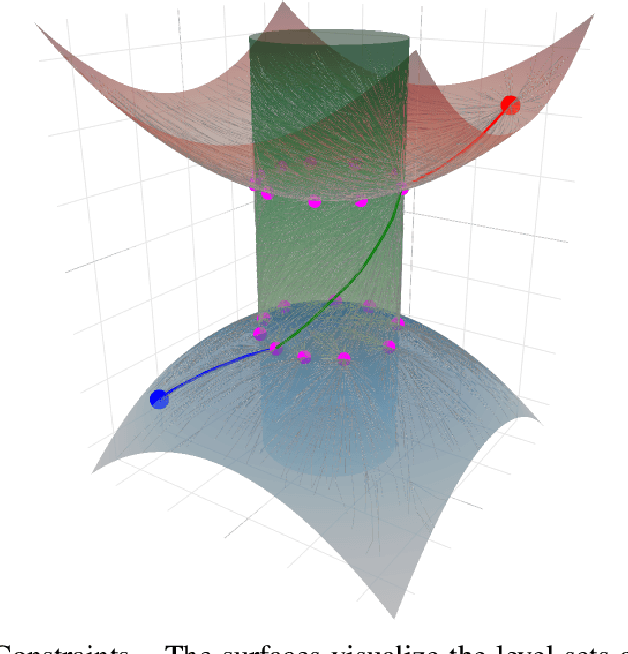
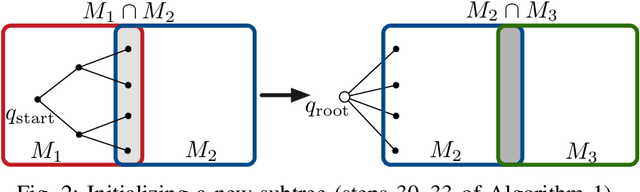
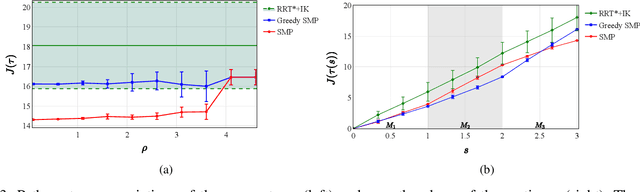
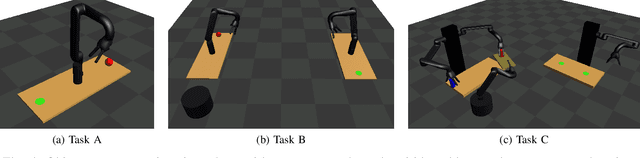
We address the problem of planning robot motions in constrained configuration spaces where the constraints change throughout the motion. A novel problem formulation is introduced that describes a task as a sequence of intersecting manifolds, which the robot needs to traverse in order to solve the task. We specify a class of sequential motion planning problems that fulfill a particular property of the change in the free configuration space when transitioning between manifolds. For this problem class, a sequential motion planning algorithm SMP is developed that searches for optimal intersection points between manifolds by using RRT* in an inner loop with a novel steering strategy. We provide a theoretical analysis regarding its probabilistic completeness and demonstrate its performance on kinematic planning problems where the constraints are represented as geometric primitives. Further, we show its capabilities on solving multi-robot object transportation tasks.