 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Sampling to Estimate Quantiles for Guiding Physical Sampling
Paper and Code
Jan 25, 2022
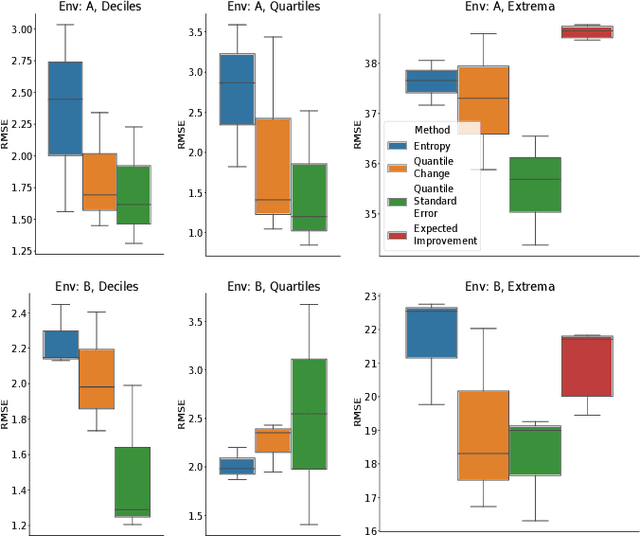
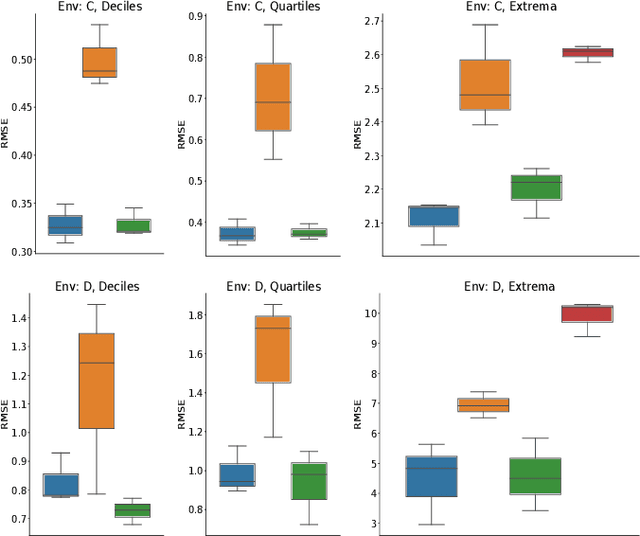
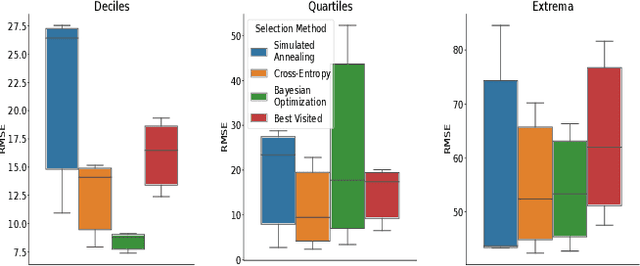
Scientists interested in studying natural phenomena often take physical samples for later analysis at locations specified by expert heuristics. Instead, we propose to guide scientists' physical sampling by using a robot to perform an adaptive sampling survey to find locations to suggest that correspond to the quantile values of pre-specified quantiles of interest. We develop a robot planner using novel objective functions to improve the estimates of the quantile values over time and an approach to find locations which correspond to the quantile values. We demonstrate our approach on two different sampling tasks in simulation using previously collected aquatic data and validate it in a field trial. Our approach outperforms objectives that maximize spatial coverage or find extrema in planning and is able to localize the quantile spatial locations.