 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce Profiling of a Shoulder Bidirectional Fabric-based Pneumatic Actuator for a Pediatric Exosuit
Jul 17, 2024This paper presents a comprehensive analysis of the contact force profile of a single-cell bidirectional soft pneumatic actuator, specifically designed to aid in the abduction and adduction of the shoulder for pediatric exosuits. The actuator was embedded in an infant-scale test rig featuring two degrees of freedom: an actuated revolute joint supporting shoulder abduction/adduction and a passive (but lockable) revolute joint supporting elbow flexion/extension. Integrated load cells and an encoder within the rig were used to measure the force applied by the actuator and the shoulder joint angle, respectively. The actuator's performance was evaluated under various anchoring points and elbow joint angles. Experimental results demonstrate that optimal performance, characterized by maximum range of motion and minimal force applied on the torso and upper arm, can be achieved when the actuator is anchored at two-thirds the length of the upper arm, with the elbow joint positioned at a 90-degree angle. The force versus pressure and joint angle graphs reveal nonlinear and hysteresis behaviors. The findings of this study yield insights about optimal anchoring points and elbow angles to minimize exerted forces without reducing the range of motion.
A Fabric-based Pneumatic Actuator for the Infant Elbow: Design and Comparative Kinematic Analysis
Oct 26, 2023This paper focuses on the design and systematic evaluation of fabric-based, bellow-type soft pneumatic actuators to assist with flexion and extension of the elbow, intended for use in infant wearable devices. Initially, the performance of a range of actuator variants was explored via simulation. The actuator variants were parameterized based on the shape, number, and size of the cells present. Subsequently, viable actuator variants identified from the simulations were fabricated and underwent further testing on a physical model based on an infant's body anthropometrics. The performance of these variants was evaluated based on kinematic analyses using metrics including movement smoothness, path length, and elbow joint angle. Internal pressure of the actuators was also attained. Taken together, results reported herein provide valuable insights about the suitability of several actuator designs to serve as components for pediatric wearable assistive devices.
BabyNet: A Lightweight Network for Infant Reaching Action Recognition in Unconstrained Environments to Support Future Pediatric Rehabilitation Applications
Aug 09, 2022

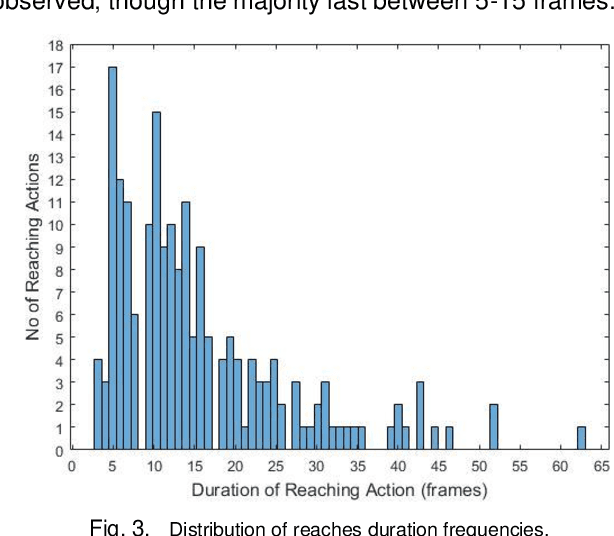
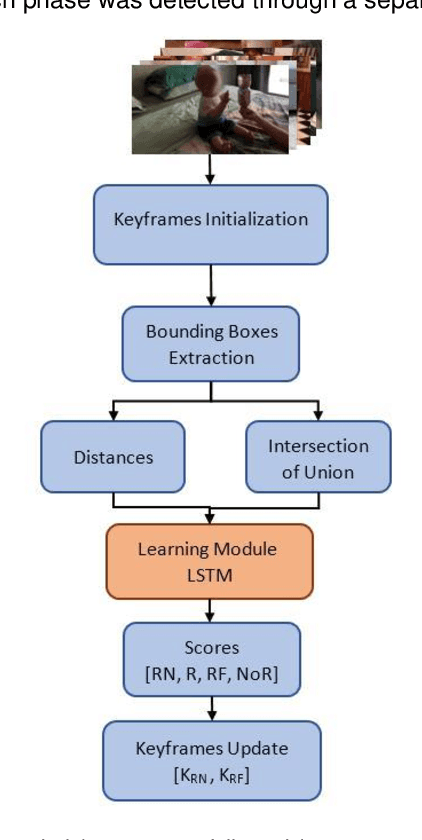
Action recognition is an important component to improve autonomy of physical rehabilitation devices, such as wearable robotic exoskeletons. Existing human action recognition algorithms focus on adult applications rather than pediatric ones. In this paper, we introduce BabyNet, a light-weight (in terms of trainable parameters) network structure to recognize infant reaching action from off-body stationary cameras. We develop an annotated dataset that includes diverse reaches performed while in a sitting posture by different infants in unconstrained environments (e.g., in home settings, etc.). Our approach uses the spatial and temporal connection of annotated bounding boxes to interpret onset and offset of reaching, and to detect a complete reaching action. We evaluate the efficiency of our proposed approach and compare its performance against other learning-based network structures in terms of capability of capturing temporal inter-dependencies and accuracy of detection of reaching onset and offset. Results indicate our BabyNet can attain solid performance in terms of (average) testing accuracy that exceeds that of other larger networks, and can hence serve as a light-weight data-driven framework for video-based infant reaching action recognition.
A Bidirectional Fabric-based Pneumatic Actuator for the Infant Shoulder: Design and Comparative Kinematic Analysis
Jun 21, 2022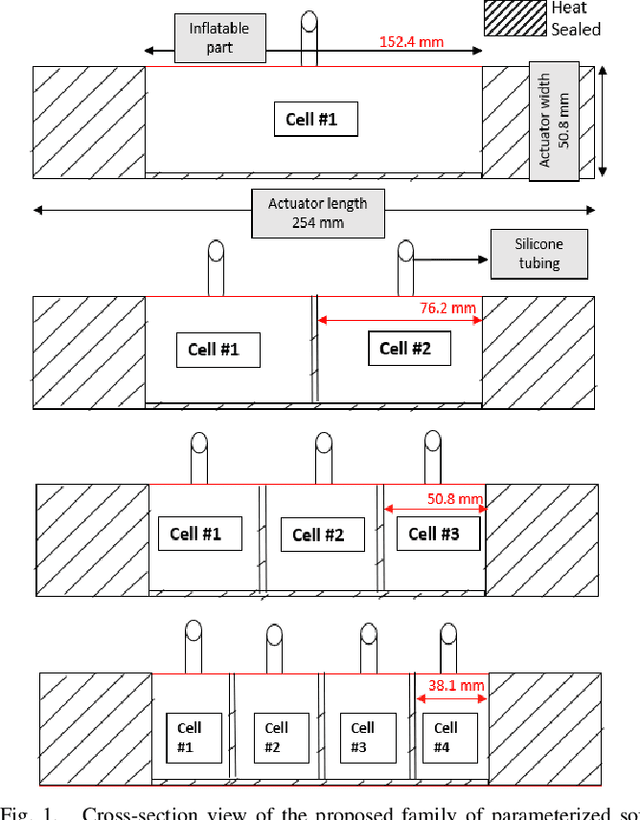
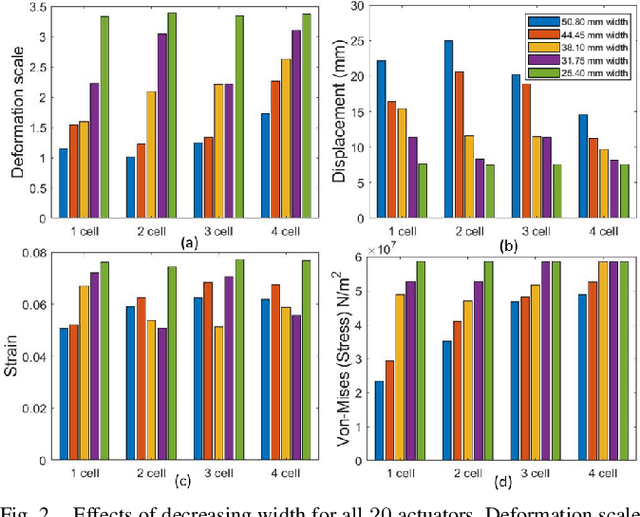
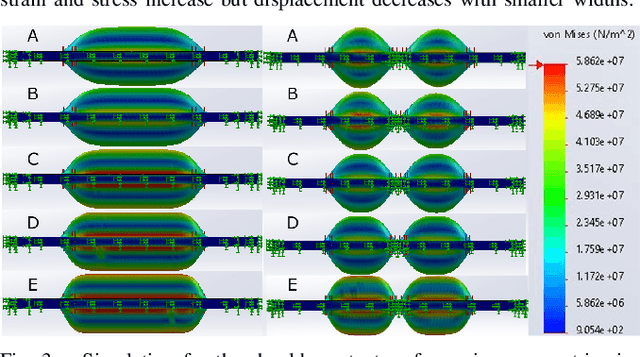
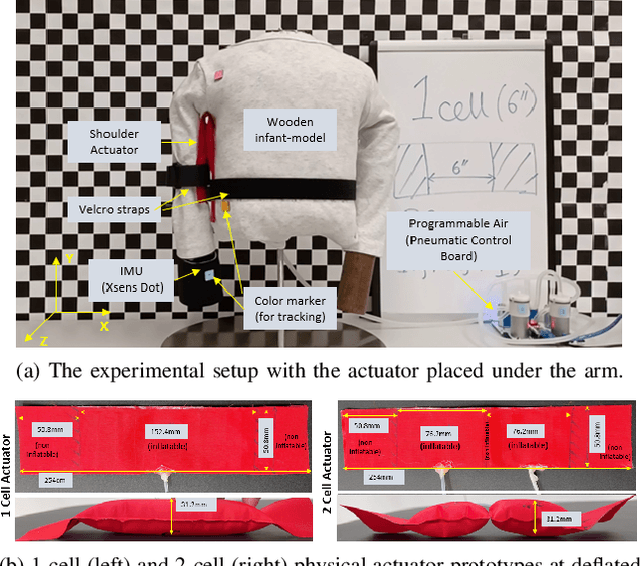
This paper presents the design and assessment of a fabric-based soft pneumatic actuator with low pressurization requirements for actuation making it suitable for upper extremity assistive devices for infants. The goal is to support shoulder abduction and adduction without prohibiting motion in other planes or obstructing elbow joint motion. First, the performance of a family of actuator designs with internal air cells is explored via simulation. The actuators are parameterized by the number of cells and their width. Physically viable actuator variants identified through the simulation are further tested via hardware experiments. Two designs are selected and tested on a custom-built physical model based on an infant's body anthropometrics. Comparisons between force exerted to lift the arm, movement smoothness, path length and maximum shoulder angle reached inform which design is better suited for its use as an actuator for pediatric wearable assistive devices, along with other insights for future work.
Closed-loop Position Control of a Pediatric Soft Robotic Wearable Device for Upper Extremity Assistance
Jun 16, 2022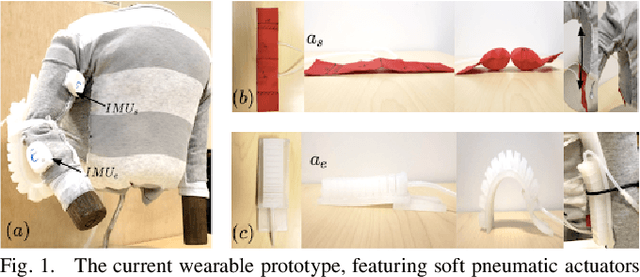
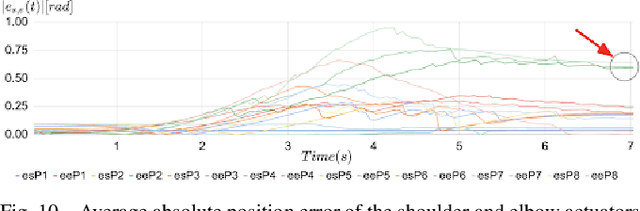
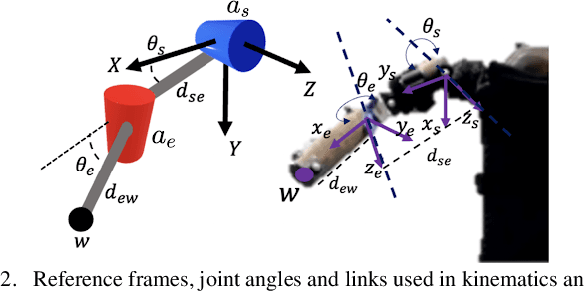
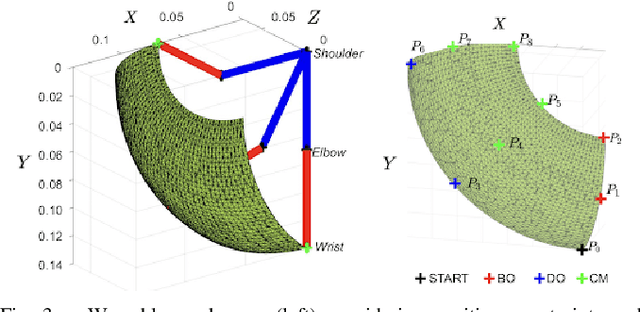
This work focuses on closed-loop control based on proprioceptive feedback for a pneumatically-actuated soft wearable device aimed at future support of infant reaching tasks. The device comprises two soft pneumatic actuators (one textile-based and one silicone-casted) actively controlling two degrees-of-freedom per arm (shoulder adduction/abduction and elbow flexion/extension, respectively). Inertial measurement units (IMUs) attached to the wearable device provide real-time joint angle feedback. Device kinematics analysis is informed by anthropometric data from infants (arm lengths) reported in the literature. Range of motion and muscle co-activation patterns in infant reaching are considered to derive desired trajectories for the device's end-effector. Then, a proportional-derivative controller is developed to regulate the pressure inside the actuators and in turn move the arm along desired setpoints within the reachable workspace. Experimental results on tracking desired arm trajectories using an engineered mannequin are presented, demonstrating that the proposed controller can help guide the mannequin's wrist to the desired setpoints.
* 6 pages