 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting abnormal heart sound using mobile phones and on-device IConNet
Dec 04, 2024


Given the global prevalence of cardiovascular diseases, there is a pressing need for easily accessible early screening methods. Typically, this requires medical practitioners to investigate heart auscultations for irregular sounds, followed by echocardiography and electrocardiography tests. To democratize early diagnosis, we present a user-friendly solution for abnormal heart sound detection, utilizing mobile phones and a lightweight neural network optimized for on-device inference. Unlike previous approaches reliant on specialized stethoscopes, our method directly analyzes audio recordings, facilitated by a novel architecture known as IConNet. IConNet, an Interpretable Convolutional Neural Network, harnesses insights from audio signal processing, enhancing efficiency and providing transparency in neural pattern extraction from raw waveform signals. This is a significant step towards trustworthy AI in healthcare, aiding in remote health monitoring efforts.
Toward end-to-end interpretable convolutional neural networks for waveform signals
May 03, 2024



This paper introduces a novel convolutional neural networks (CNN) framework tailored for end-to-end audio deep learning models, presenting advancements in efficiency and explainability. By benchmarking experiments on three standard speech emotion recognition datasets with five-fold cross-validation, our framework outperforms Mel spectrogram features by up to seven percent. It can potentially replace the Mel-Frequency Cepstral Coefficients (MFCC) while remaining lightweight. Furthermore, we demonstrate the efficiency and interpretability of the front-end layer using the PhysioNet Heart Sound Database, illustrating its ability to handle and capture intricate long waveform patterns. Our contributions offer a portable solution for building efficient and interpretable models for raw waveform data.
Superhuman Fairness
Jan 31, 2023The fairness of machine learning-based decisions has become an increasingly important focus in the design of supervised machine learning methods. Most fairness approaches optimize a specified trade-off between performance measure(s) (e.g., accuracy, log loss, or AUC) and fairness metric(s) (e.g., demographic parity, equalized odds). This begs the question: are the right performance-fairness trade-offs being specified? We instead re-cast fair machine learning as an imitation learning task by introducing superhuman fairness, which seeks to simultaneously outperform human decisions on multiple predictive performance and fairness measures. We demonstrate the benefits of this approach given suboptimal decisions.
Closed-loop Position Control of a Pediatric Soft Robotic Wearable Device for Upper Extremity Assistance
Jun 16, 2022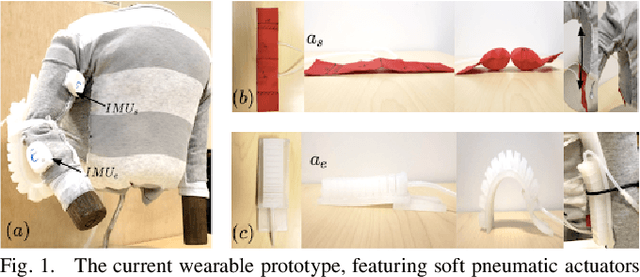
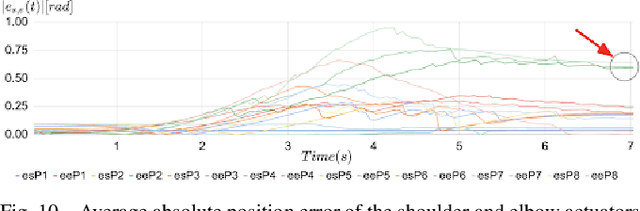
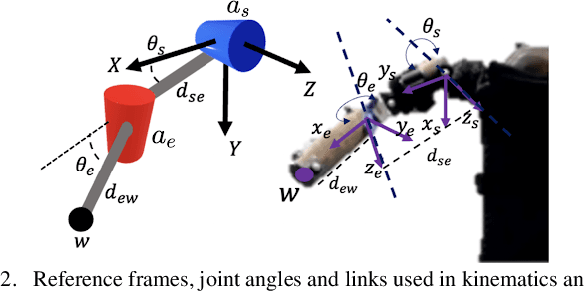
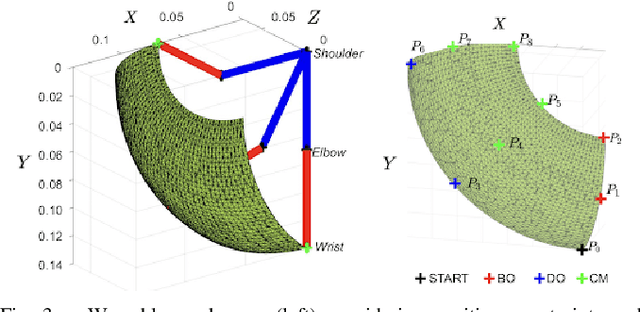
This work focuses on closed-loop control based on proprioceptive feedback for a pneumatically-actuated soft wearable device aimed at future support of infant reaching tasks. The device comprises two soft pneumatic actuators (one textile-based and one silicone-casted) actively controlling two degrees-of-freedom per arm (shoulder adduction/abduction and elbow flexion/extension, respectively). Inertial measurement units (IMUs) attached to the wearable device provide real-time joint angle feedback. Device kinematics analysis is informed by anthropometric data from infants (arm lengths) reported in the literature. Range of motion and muscle co-activation patterns in infant reaching are considered to derive desired trajectories for the device's end-effector. Then, a proportional-derivative controller is developed to regulate the pressure inside the actuators and in turn move the arm along desired setpoints within the reachable workspace. Experimental results on tracking desired arm trajectories using an engineered mannequin are presented, demonstrating that the proposed controller can help guide the mannequin's wrist to the desired setpoints.
* 6 pages