 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce Profiling of a Shoulder Bidirectional Fabric-based Pneumatic Actuator for a Pediatric Exosuit
Paper and Code
Jul 17, 2024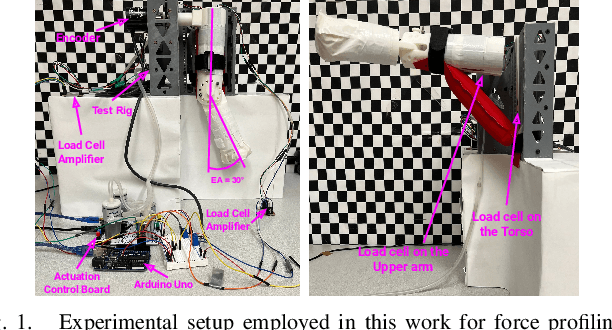
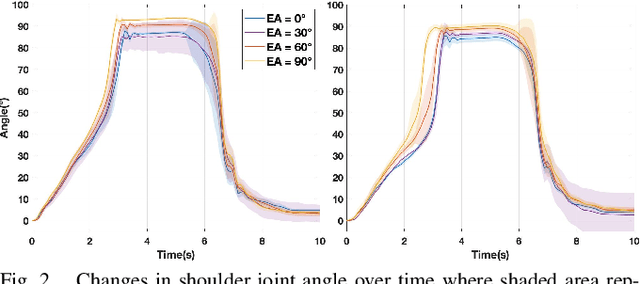
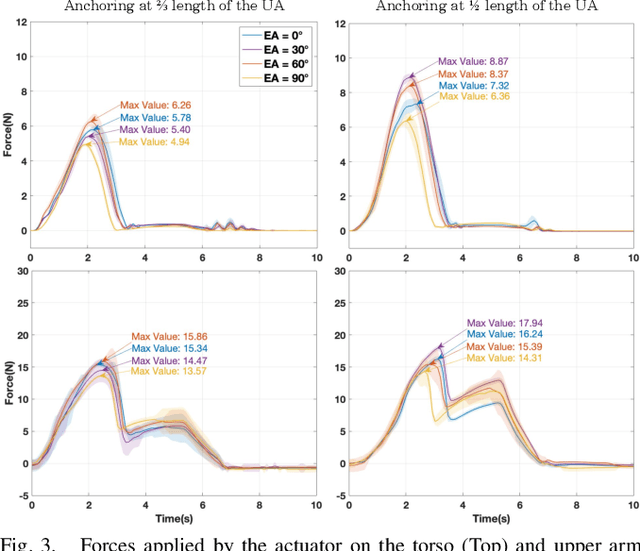
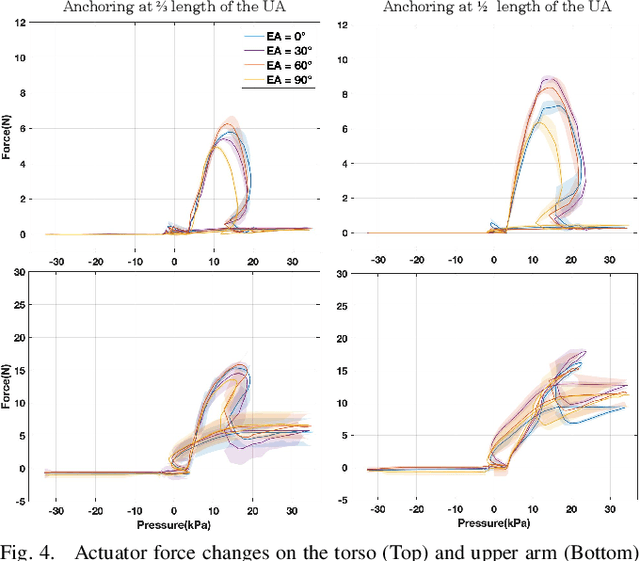
This paper presents a comprehensive analysis of the contact force profile of a single-cell bidirectional soft pneumatic actuator, specifically designed to aid in the abduction and adduction of the shoulder for pediatric exosuits. The actuator was embedded in an infant-scale test rig featuring two degrees of freedom: an actuated revolute joint supporting shoulder abduction/adduction and a passive (but lockable) revolute joint supporting elbow flexion/extension. Integrated load cells and an encoder within the rig were used to measure the force applied by the actuator and the shoulder joint angle, respectively. The actuator's performance was evaluated under various anchoring points and elbow joint angles. Experimental results demonstrate that optimal performance, characterized by maximum range of motion and minimal force applied on the torso and upper arm, can be achieved when the actuator is anchored at two-thirds the length of the upper arm, with the elbow joint positioned at a 90-degree angle. The force versus pressure and joint angle graphs reveal nonlinear and hysteresis behaviors. The findings of this study yield insights about optimal anchoring points and elbow angles to minimize exerted forces without reducing the range of motion.