 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-verbal Interaction and Interface with a Quadruped Robot using Body and Hand Gestures: Design and User Experience Evaluation
Aug 30, 2024



In recent years, quadruped robots have attracted significant attention due to their practical advantages in maneuverability, particularly when navigating rough terrain and climbing stairs. As these robots become more integrated into various industries, including construction and healthcare, researchers have increasingly focused on developing intuitive interaction methods such as speech and gestures that do not require separate devices such as keyboards or joysticks. This paper aims at investigating a comfortable and efficient interaction method with quadruped robots that possess a familiar form factor. To this end, we conducted two preliminary studies to observe how individuals naturally interact with a quadruped robot in natural and controlled settings, followed by a prototype experiment to examine human preferences for body-based and hand-based gesture controls using a Unitree Go1 Pro quadruped robot. We assessed the user experience of 13 participants using the User Experience Questionnaire and measured the time taken to complete specific tasks. The findings of our preliminary results indicate that humans have a natural preference for communicating with robots through hand and body gestures rather than speech. In addition, participants reported higher satisfaction and completed tasks more quickly when using body gestures to interact with the robot. This contradicts the fact that most gesture-based control technologies for quadruped robots are hand-based. The video is available at https://youtu.be/rysv1p1zvp4.
Efficient Quantum Circuits for Machine Learning Activation Functions including Constant T-depth ReLU
Apr 09, 2024



In recent years, Quantum Machine Learning (QML) has increasingly captured the interest of researchers. Among the components in this domain, activation functions hold a fundamental and indispensable role. Our research focuses on the development of activation functions quantum circuits for integration into fault-tolerant quantum computing architectures, with an emphasis on minimizing $T$-depth. Specifically, we present novel implementations of ReLU and leaky ReLU activation functions, achieving constant $T$-depths of 4 and 8, respectively. Leveraging quantum lookup tables, we extend our exploration to other activation functions such as the sigmoid. This approach enables us to customize precision and $T$-depth by adjusting the number of qubits, making our results more adaptable to various application scenarios. This study represents a significant advancement towards enhancing the practicality and application of quantum machine learning.
SCOPE: Safe Exploration for Dynamic Computer Systems Optimization
Apr 22, 2022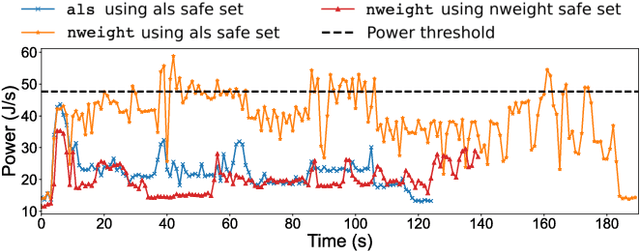
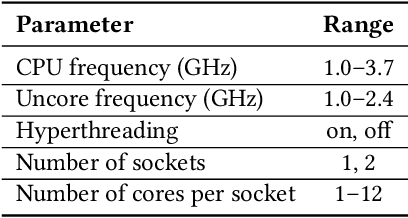
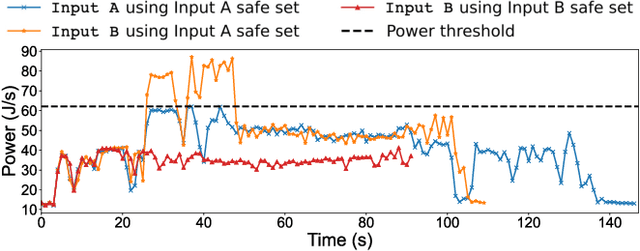
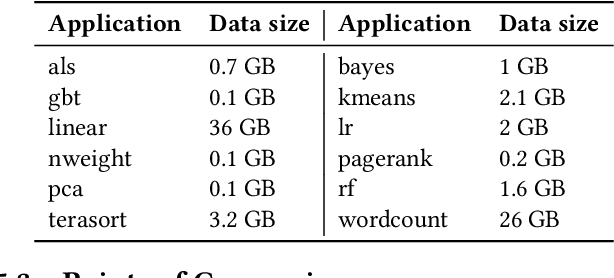
Modern computer systems need to execute under strict safety constraints (e.g., a power limit), but doing so often conflicts with their ability to deliver high performance (i.e. minimal latency). Prior work uses machine learning to automatically tune hardware resources such that the system execution meets safety constraints optimally. Such solutions monitor past system executions to learn the system's behavior under different hardware resource allocations before dynamically tuning resources to optimize the application execution. However, system behavior can change significantly between different applications and even different inputs of the same applications. Hence, the models learned using data collected a priori are often suboptimal and violate safety constraints when used with new applications and inputs. To address this limitation, we introduce the concept of an execution space, which is the cross product of hardware resources, input features, and applications. To dynamically and safely allocate hardware resources from the execution space, we present SCOPE, a resource manager that leverages a novel safe exploration framework. We evaluate SCOPE's ability to deliver improved latency while minimizing power constraint violations by dynamically configuring hardware while running a variety of Apache Spark applications. Compared to prior approaches that minimize power constraint violations, SCOPE consumes comparable power while improving latency by up to 9.5X. Compared to prior approaches that minimize latency, SCOPE achieves similar latency but reduces power constraint violation rates by up to 45.88X, achieving almost zero safety constraint violations across all applications.