 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Robotic Radio Source Localization via a Novel Gaussian Mixture Filtering Approach
Mar 13, 2025This study proposes a new Gaussian Mixture Filter (GMF) to improve the estimation performance for the autonomous robotic radio signal source search and localization problem in unknown environments. The proposed filter is first tested with a benchmark numerical problem to validate the performance with other state-of-practice approaches such as Particle Gaussian Mixture (PGM) filters and Particle Filter (PF). Then the proposed approach is tested and compared against PF and PGM filters in real-world robotic field experiments to validate its impact for real-world robotic applications. The considered real-world scenarios have partial observability with the range-only measurement and uncertainty with the measurement model. The results show that the proposed filter can handle this partial observability effectively whilst showing improved performance compared to PF, reducing the computation requirements while demonstrating improved robustness over compared techniques.
Synchronisation-Oriented Design Approach for Adaptive Control
Mar 14, 2024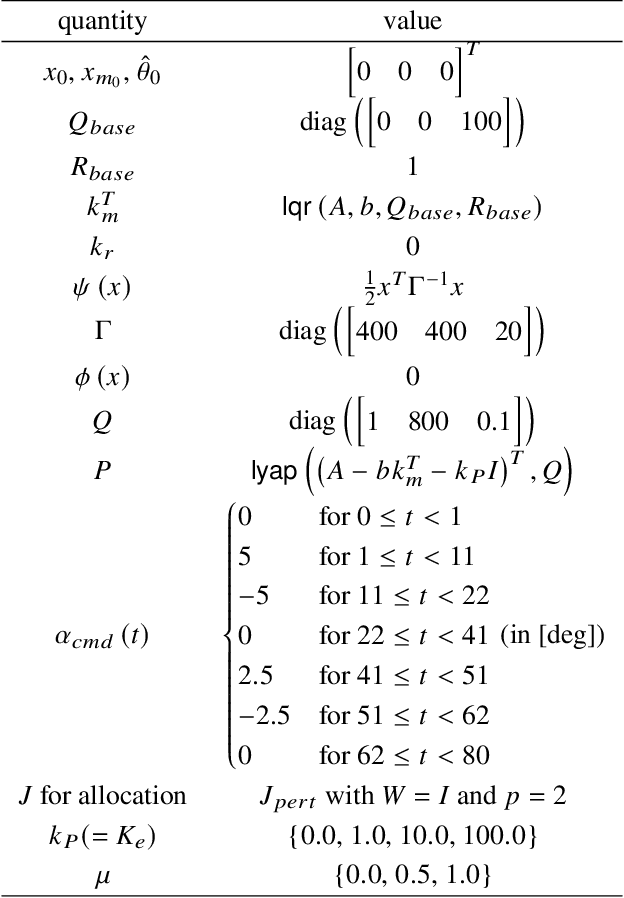
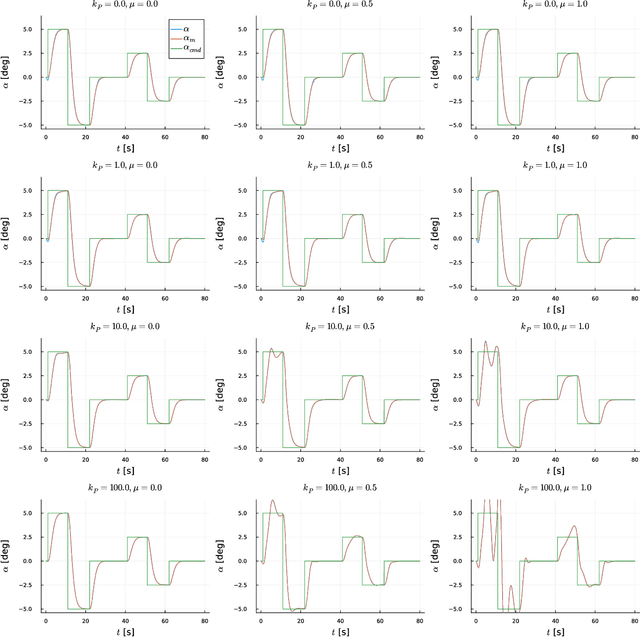
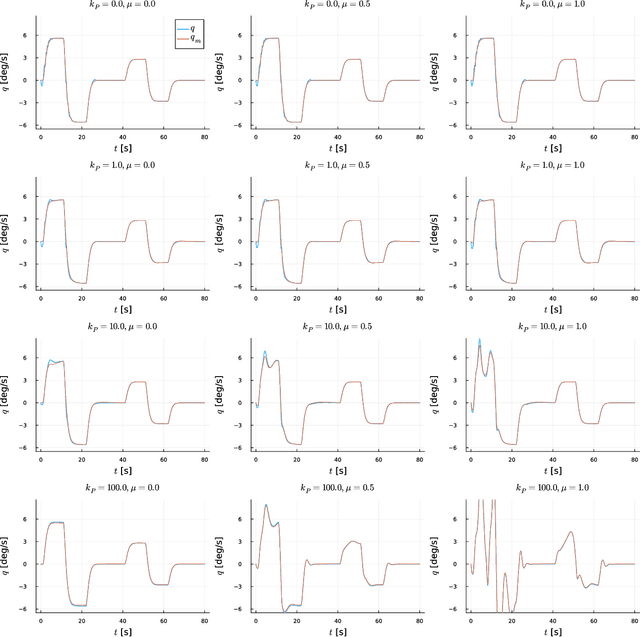
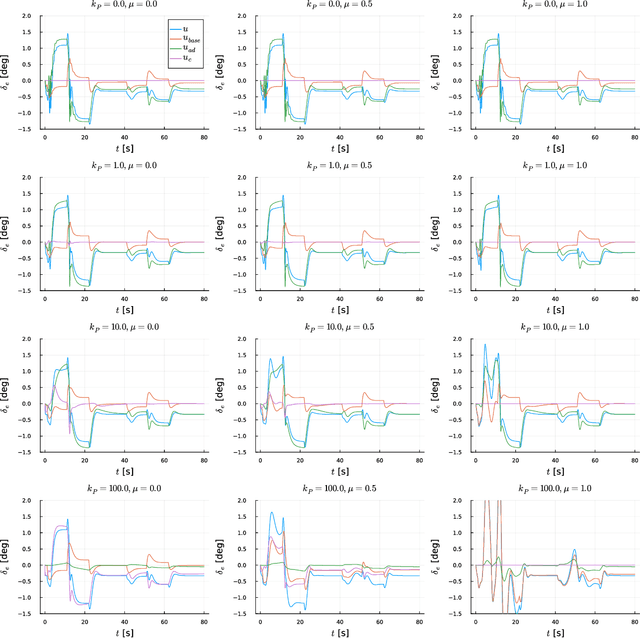
This study presents a synchronisation-oriented perspective towards adaptive control which views model-referenced adaptation as synchronisation between actual and virtual dynamic systems. In the context of adaptation, model reference adaptive control methods make the state response of the actual plant follow a reference model. In the context of synchronisation, consensus methods involving diffusive coupling induce a collective behaviour across multiple agents. We draw from the understanding about the two time-scale nature of synchronisation motivated by the study of blended dynamics. The synchronisation-oriented approach consists in the design of a coupling input to achieve desired closed-loop error dynamics followed by the input allocation process to shape the collective behaviour. We suggest that synchronisation can be a reasonable design principle allowing a more holistic and systematic approach to the design of adaptive control systems for improved transient characteristics. Most notably, the proposed approach enables not only constructive derivation but also substantial generalisation of the previously developed closed-loop reference model adaptive control method. Practical significance of the proposed generalisation lies at the capability to improve the transient response characteristics and mitigate the unwanted peaking phenomenon at the same time.
Automatic Optimisation of Normalised Neural Networks
Dec 17, 2023We propose automatic optimisation methods considering the geometry of matrix manifold for the normalised parameters of neural networks. Layerwise weight normalisation with respect to Frobenius norm is utilised to bound the Lipschitz constant and to enhance gradient reliability so that the trained networks are suitable for control applications. Our approach first initialises the network and normalises the data with respect to the $\ell^{2}$-$\ell^{2}$ gain of the initialised network. Then, the proposed algorithms take the update structure based on the exponential map on high-dimensional spheres. Given an update direction such as that of the negative Riemannian gradient, we propose two different ways to determine the stepsize for descent. The first algorithm utilises automatic differentiation of the objective function along the update curve defined on the combined manifold of spheres. The directional second-order derivative information can be utilised without requiring explicit construction of the Hessian. The second algorithm utilises the majorisation-minimisation framework via architecture-aware majorisation for neural networks. With these new developments, the proposed methods avoid manual tuning and scheduling of the learning rate, thus providing an automated pipeline for optimizing normalised neural networks.
Dynamic deep-reinforcement-learning algorithm in Partially Observed Markov Decision Processes
Jul 29, 2023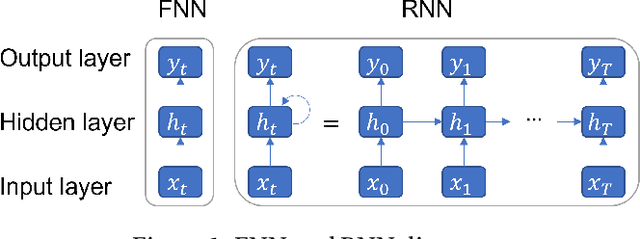
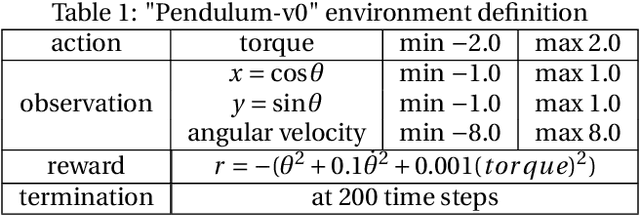
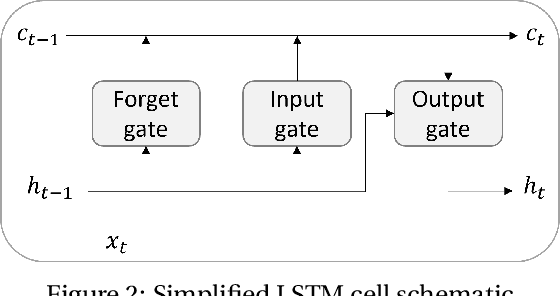
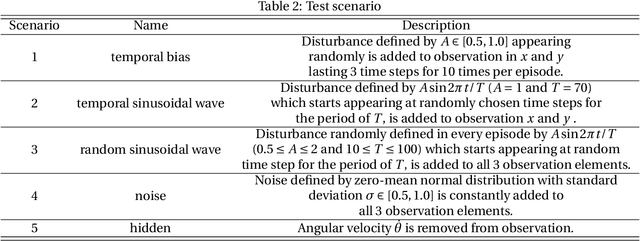
Reinforcement learning has been greatly improved in recent studies and an increased interest in real-world implementation has emerged in recent years. In many cases, due to the non-static disturbances, it becomes challenging for the agent to keep the performance. The disturbance results in the environment called Partially Observable Markov Decision Process. In common practice, Partially Observable Markov Decision Process is handled by introducing an additional estimator, or Recurrent Neural Network is utilized in the context of reinforcement learning. Both of the cases require to process sequential information on the trajectory. However, there are only a few studies investigating the effect of information to consider and the network structure to handle them. This study shows the benefit of action sequence inclusion in order to solve Partially Observable Markov Decision Process. Several structures and approaches are proposed to extend one of the latest deep reinforcement learning algorithms with LSTM networks. The developed algorithms showed enhanced robustness of controller performance against different types of external disturbances that are added to observation.
A Passivity-Based Method for Accelerated Convex Optimisation
Jun 20, 2023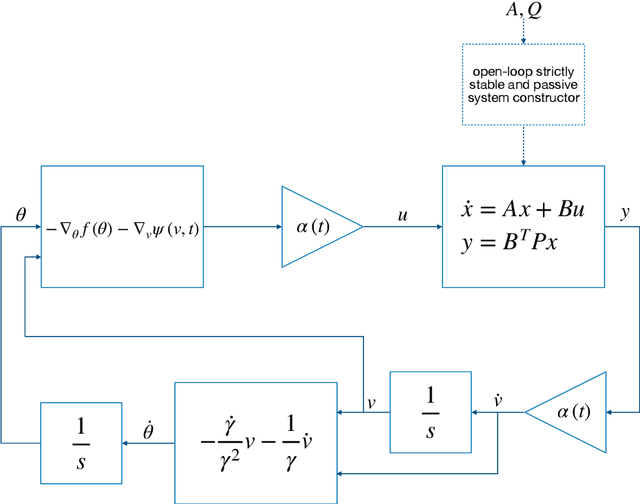
This study presents a constructive methodology for designing accelerated convex optimisation algorithms in continuous-time domain. The two key enablers are the classical concept of passivity in control theory and the time-dependent change of variables that maps the output of the internal dynamic system to the optimisation variables. The Lyapunov function associated with the optimisation dynamics is obtained as a natural consequence of specifying the internal dynamics that drives the state evolution as a passive linear time-invariant system. The passivity-based methodology provides a general framework that has the flexibility to generate convex optimisation algorithms with the guarantee of different convergence rate bounds on the objective function value. The same principle applies to the design of online parameter update algorithms for adaptive control by re-defining the output of internal dynamics to allow for the feedback interconnection with tracking error dynamics.
Domain-Knowledge-Aided Airborne Ground Moving Targets Tracking
Mar 12, 2023

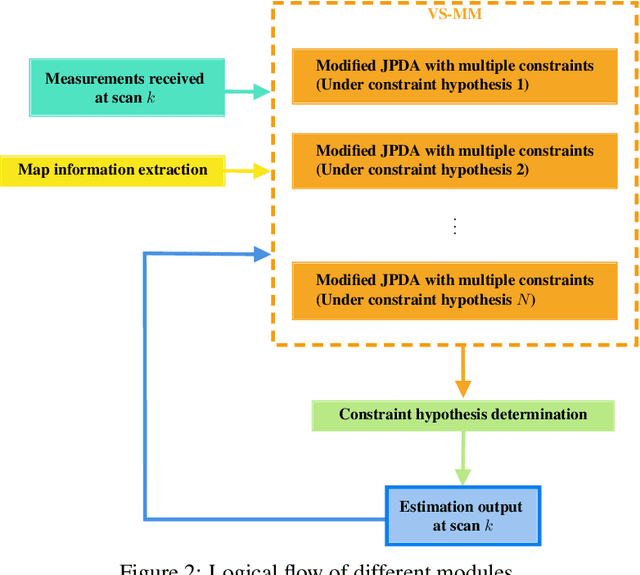

This paper investigates the problem of traffic surveillance using an unmanned aerial vehicle (UAV) and proposes a domain-knowledge-aided airborne ground moving targets tracking algorithm. To improve the accuracy of multiple targets tracking, the proposed algorithm incorporates domain knowledge into the joint probabilistic data association (JPDA) filter as state constraints. The domain knowledge considered in this paper includes both road information extracted from a given map and local traffic regulations. Conventional track update method is modified to enhance the capability of recognition of temporarily track loss. A variable structure multiple model (VS-MM) method is developed to assign the road segment to a given target. The effectiveness of proposed algorithm is demonstrated through extensive numerical simulations.
An Auction-based Coordination Strategy for Task-Constrained Multi-Agent Stochastic Planning with Submodular Rewards
Dec 30, 2022In many domains such as transportation and logistics, search and rescue, or cooperative surveillance, tasks are pending to be allocated with the consideration of possible execution uncertainties. Existing task coordination algorithms either ignore the stochastic process or suffer from the computational intensity. Taking advantage of the weakly coupled feature of the problem and the opportunity for coordination in advance, we propose a decentralized auction-based coordination strategy using a newly formulated score function which is generated by forming the problem into task-constrained Markov decision processes (MDPs). The proposed method guarantees convergence and at least 50% optimality in the premise of a submodular reward function. Furthermore, for the implementation on large-scale applications, an approximate variant of the proposed method, namely Deep Auction, is also suggested with the use of neural networks, which is evasive of the troublesome for constructing MDPs. Inspired by the well-known actor-critic architecture, two Transformers are used to map observations to action probabilities and cumulative rewards respectively. Finally, we demonstrate the performance of the two proposed approaches in the context of drone deliveries, where the stochastic planning for the drone league is cast into a stochastic price-collecting Vehicle Routing Problem (VRP) with time windows. Simulation results are compared with state-of-the-art methods in terms of solution quality, planning efficiency and scalability.
Incremental Correction in Dynamic Systems Modelled with Neural Networks for Constraint Satisfaction
Sep 08, 2022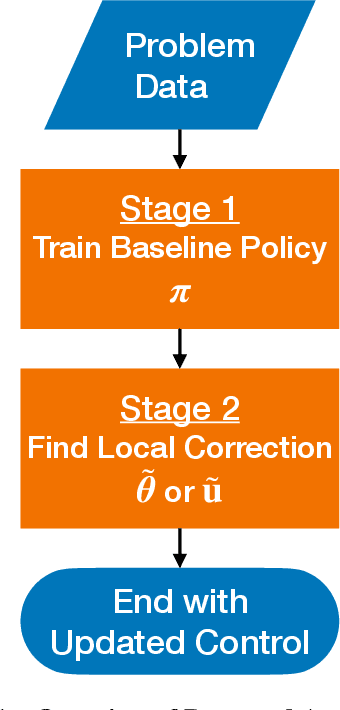
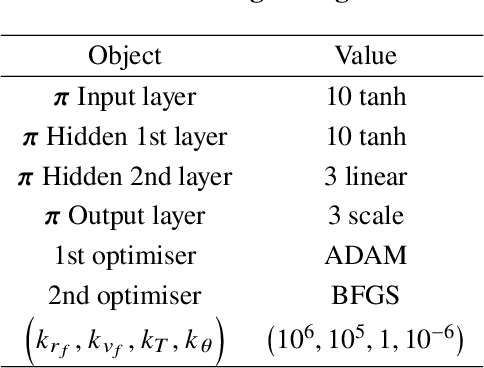
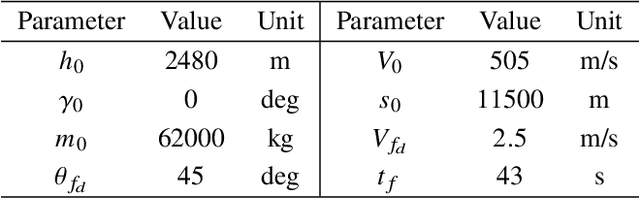
This study presents incremental correction methods for refining neural network parameters or control functions entering into a continuous-time dynamic system to achieve improved solution accuracy in satisfying the interim point constraints placed on the performance output variables. The proposed approach is to linearise the dynamics around the baseline values of its arguments, and then to solve for the corrective input required to transfer the perturbed trajectory to precisely known or desired values at specific time points, i.e., the interim points. Depending on the type of decision variables to adjust, parameter correction and control function correction methods are developed. These incremental correction methods can be utilised as a means to compensate for the prediction errors of pre-trained neural networks in real-time applications where high accuracy of the prediction of dynamical systems at prescribed time points is imperative. In this regard, the online update approach can be useful for enhancing overall targeting accuracy of finite-horizon control subject to point constraints using a neural policy. Numerical example demonstrates the effectiveness of the proposed approach in an application to a powered descent problem at Mars.
Bayesian Learning Approach to Model Predictive Control
Mar 11, 2022This study presents a Bayesian learning perspective towards model predictive control algorithms. High-level frameworks have been developed separately in the earlier studies on Bayesian learning and sampling-based model predictive control. On one hand, the Bayesian learning rule provides a general framework capable of generating various machine learning algorithms as special instances. On the other hand, the dynamic mirror descent model predictive control framework is capable of diversifying sample-rollout-based control algorithms. However, connections between the two frameworks have still not been fully appreciated in the context of stochastic optimal control. This study combines the Bayesian learning rule point of view into the model predictive control setting by taking inspirations from the view of understanding model predictive controller as an online learner. The selection of posterior class and natural gradient approximation for the variational formulation governs diversification of model predictive control algorithms in the Bayesian learning approach to model predictive control. This alternative viewpoint complements the dynamic mirror descent framework through streamlining the explanation of design choices.
Optimisation of Structured Neural Controller Based on Continuous-Time Policy Gradient
Jan 24, 2022


This study presents a policy optimisation framework for structured nonlinear control of continuous-time (deterministic) dynamic systems. The proposed approach prescribes a structure for the controller based on relevant scientific knowledge (such as Lyapunov stability theory or domain experiences) while considering the tunable elements inside the given structure as the point of parametrisation with neural networks. To optimise a cost represented as a function of the neural network weights, the proposed approach utilises the continuous-time policy gradient method based on adjoint sensitivity analysis as a means for correct and performant computation of cost gradient. This enables combining the stability, robustness, and physical interpretability of an analytically-derived structure for the feedback controller with the representational flexibility and optimised resulting performance provided by machine learning techniques. Such a hybrid paradigm for fixed-structure control synthesis is particularly useful for optimising adaptive nonlinear controllers to achieve improved performance in online operation, an area where the existing theory prevails the design of structure while lacking clear analytical understandings about tuning of the gains and the uncertainty model basis functions that govern the performance characteristics. Numerical experiments on aerospace applications illustrate the utility of the structured nonlinear controller optimisation framework.