 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain-Knowledge-Aided Airborne Ground Moving Targets Tracking
Mar 12, 2023

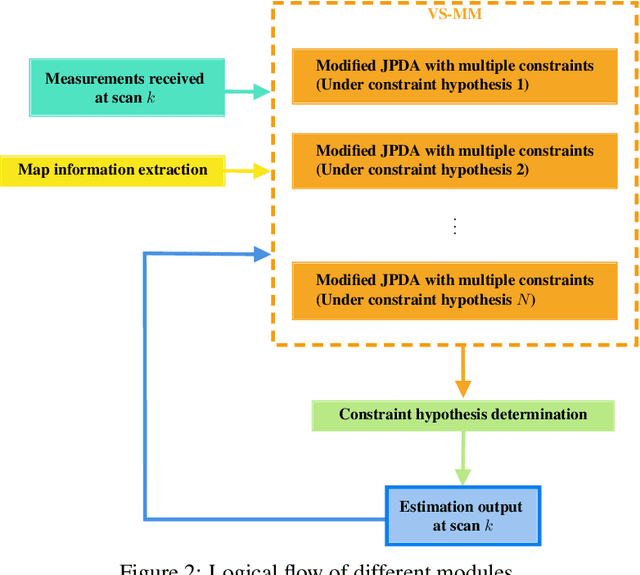

This paper investigates the problem of traffic surveillance using an unmanned aerial vehicle (UAV) and proposes a domain-knowledge-aided airborne ground moving targets tracking algorithm. To improve the accuracy of multiple targets tracking, the proposed algorithm incorporates domain knowledge into the joint probabilistic data association (JPDA) filter as state constraints. The domain knowledge considered in this paper includes both road information extracted from a given map and local traffic regulations. Conventional track update method is modified to enhance the capability of recognition of temporarily track loss. A variable structure multiple model (VS-MM) method is developed to assign the road segment to a given target. The effectiveness of proposed algorithm is demonstrated through extensive numerical simulations.