 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimisation of Structured Neural Controller Based on Continuous-Time Policy Gradient
Paper and Code
Jan 24, 2022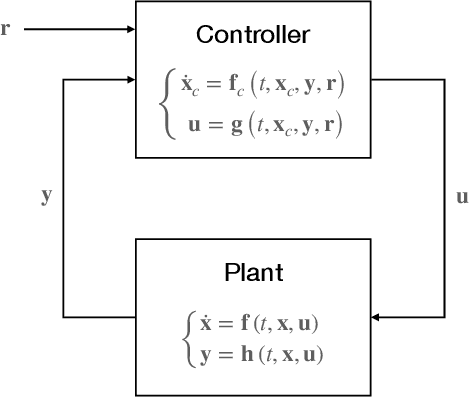


This study presents a policy optimisation framework for structured nonlinear control of continuous-time (deterministic) dynamic systems. The proposed approach prescribes a structure for the controller based on relevant scientific knowledge (such as Lyapunov stability theory or domain experiences) while considering the tunable elements inside the given structure as the point of parametrisation with neural networks. To optimise a cost represented as a function of the neural network weights, the proposed approach utilises the continuous-time policy gradient method based on adjoint sensitivity analysis as a means for correct and performant computation of cost gradient. This enables combining the stability, robustness, and physical interpretability of an analytically-derived structure for the feedback controller with the representational flexibility and optimised resulting performance provided by machine learning techniques. Such a hybrid paradigm for fixed-structure control synthesis is particularly useful for optimising adaptive nonlinear controllers to achieve improved performance in online operation, an area where the existing theory prevails the design of structure while lacking clear analytical understandings about tuning of the gains and the uncertainty model basis functions that govern the performance characteristics. Numerical experiments on aerospace applications illustrate the utility of the structured nonlinear controller optimisation framework.