 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic deep-reinforcement-learning algorithm in Partially Observed Markov Decision Processes
Jul 29, 2023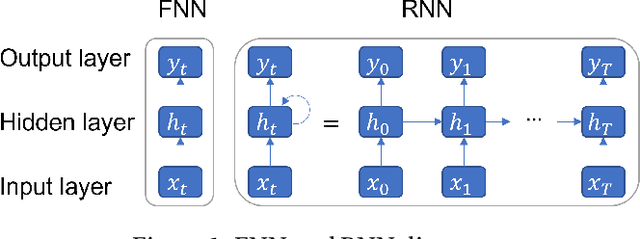
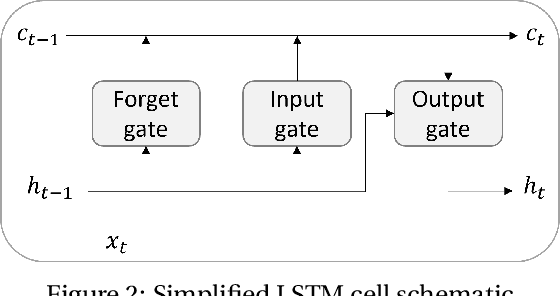
Reinforcement learning has been greatly improved in recent studies and an increased interest in real-world implementation has emerged in recent years. In many cases, due to the non-static disturbances, it becomes challenging for the agent to keep the performance. The disturbance results in the environment called Partially Observable Markov Decision Process. In common practice, Partially Observable Markov Decision Process is handled by introducing an additional estimator, or Recurrent Neural Network is utilized in the context of reinforcement learning. Both of the cases require to process sequential information on the trajectory. However, there are only a few studies investigating the effect of information to consider and the network structure to handle them. This study shows the benefit of action sequence inclusion in order to solve Partially Observable Markov Decision Process. Several structures and approaches are proposed to extend one of the latest deep reinforcement learning algorithms with LSTM networks. The developed algorithms showed enhanced robustness of controller performance against different types of external disturbances that are added to observation.