 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRR-Based Line-Laser Scanning for Reliable Vehicular Positioning and Optical Communication
Dec 13, 2025High-speed vehicular environments require optical systems capable of joint sensing, positioning, and communication (JSPC) without mechanical tracking. Existing optical and integrated sensing-communication approaches often rely on point-source emitters or camera-based receivers, limiting spatial coverage and update rate under highway dynamics. This work introduces a new class of tracking-free optical JSPC systems that combine structured line-laser illumination with modulating retroreflector (MRR) arrays on vehicles. Two orthogonal line lasers perform synchronized longitudinal and transverse scanning to provide continuous, wide-area coverage across the roadway. A coverage-driven analytical framework models the coupling between beam divergence, scan geometry, and dwell-time allocation, enabling joint evaluation of sensing reliability and communication quality. An optimization scheme is developed to adapt scanning and divergence parameters for uniform coverage and power efficiency. Simulation results demonstrate significant improvements in spatial coverage uniformity, link stability, and reliability within a fixed scan period. These results establish a practical pathway toward scalable, turbulence-resilient optical architectures for next-generation vehicular JSPC networks.
Optical Wireless Communications: Enabling the Next Generation Network of Networks
Dec 21, 2024



Optical wireless communication (OWC) is a promising technology anticipated to play a key role in the next-generation network of networks. To this end, this paper details the potential of OWC, as a complementary technology to traditional radio frequency communications, in enhancing networking capabilities beyond conventional terrestrial networks. Several usage scenarios and the current state of development are presented. Furthermore, a summary of existing challenges and opportunities are provided. Emerging technologies aimed at further enhancing future OWC capabilities are introduced. Additionally, value-added OWC-based technologies that leverage the unique properties of light are discussed, including applications such as positioning and gesture recognition. The paper concludes with the reflection that OWC provides unique functionalities that can play a crucial role in building convergent and resilient future network of networks.
AI-Native Multi-Access Future Networks -- The REASON Architecture
Nov 25, 2024

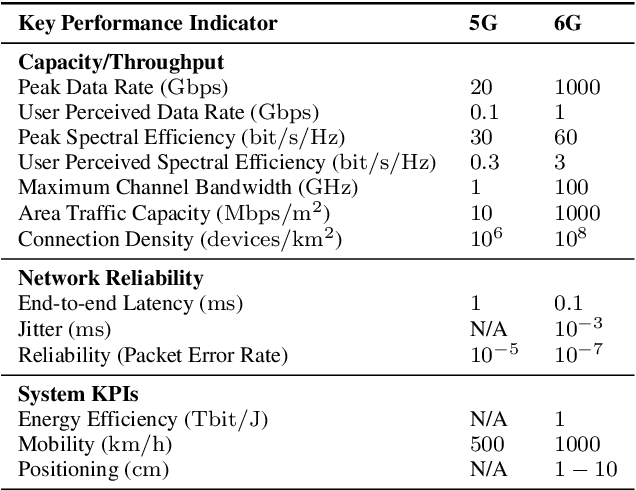
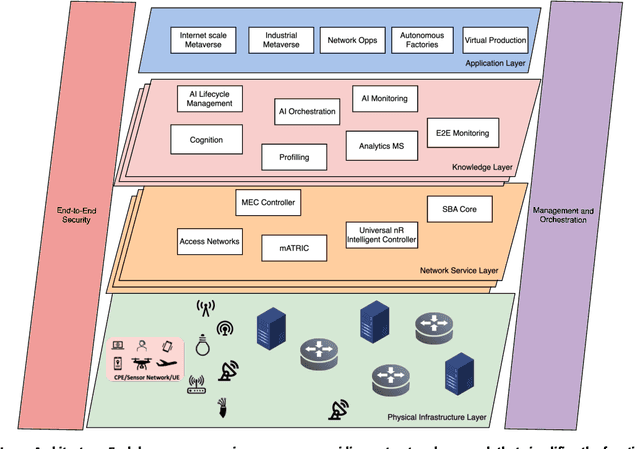
The development of the sixth generation of communication networks (6G) has been gaining momentum over the past years, with a target of being introduced by 2030. Several initiatives worldwide are developing innovative solutions and setting the direction for the key features of these networks. Some common emerging themes are the tight integration of AI, the convergence of multiple access technologies and sustainable operation, aiming to meet stringent performance and societal requirements. To that end, we are introducing REASON - Realising Enabling Architectures and Solutions for Open Networks. The REASON project aims to address technical challenges in future network deployments, such as E2E service orchestration, sustainability, security and trust management, and policy management, utilising AI-native principles, considering multiple access technologies and cloud-native solutions. This paper presents REASON's architecture and the identified requirements for future networks. The architecture is meticulously designed for modularity, interoperability, scalability, simplified troubleshooting, flexibility, and enhanced security, taking into consideration current and future standardisation efforts, and the ease of implementation and training. It is structured into four horizontal layers: Physical Infrastructure, Network Service, Knowledge, and End-User Application, complemented by two vertical layers: Management and Orchestration, and E2E Security. This layered approach ensures a robust, adaptable framework to support the diverse and evolving requirements of 6G networks, fostering innovation and facilitating seamless integration of advanced technologies.
Beam Tracking for UAV-Assisted FSO Links With a Four-Quadrant Detector
Sep 16, 2021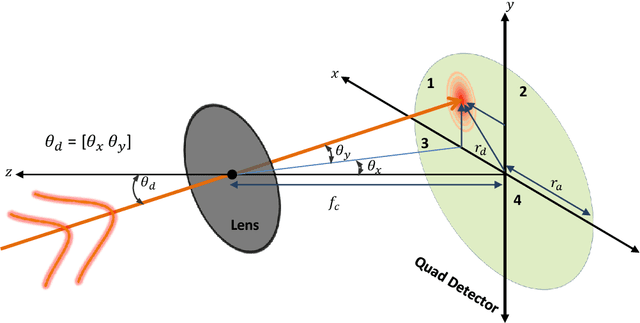
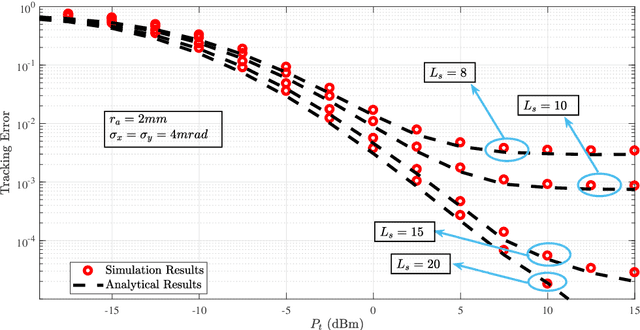
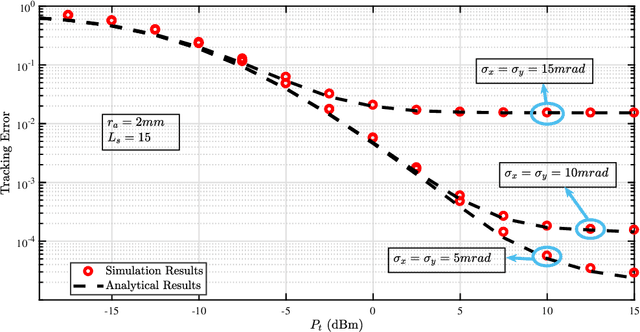
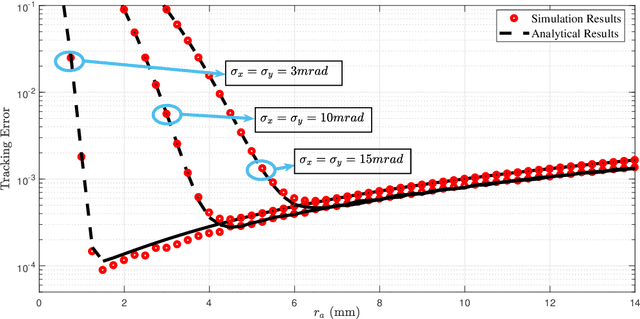
A ground-to-air free-space optical link is studied for a hovering unmanned aerial vehicle (UAV) having multiple rotors. For this UAV, a four-quadrant array of photodetectors is used at the optical receiver to alleviate the adverse effect of hovering fluctuations by enlarging the receiver field-of-view. Extensive mathematical analysis is conducted to evaluate the beam tracking performance under the random effects of hovering fluctuations. The accuracy of the derived analytical expressions is corroborated by performing Monte-Carlo simulations. It is shown that the performance of such links depends heavily on the random fluctuations of hovering UAV, and, for each level of instability there is an optimal size for the array that minimizes the tracking error probability