 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlug-and-Play Guidance for Discrete Diffusion Models via Gradient-Informed Logit Correction
Jun 04, 2026Controllable generation with discrete diffusion models is often hindered by high computational overhead or the need for retraining. In this paper, we present \underline{\textbf{G}}radient-\underline{\textbf{I}}nformed \underline{\textbf{L}}ogit \underline{\textbf{C}}orrection (\textbf{GILC}), a plug-and-play framework that efficiently estimates guidance signals by repurposing the pretrained denoising network as a variational proxy. To circumvent the gradient instability inherent in high-dimensional discrete spaces, we introduce a Jacobian-free mechanism that directly corrects the clean prediction logits, facilitating stable and effective guidance. Our method accommodates both differentiable and non-differentiable reward functions. Extensive experiments across DNA, protein sequence, and molecular generation tasks demonstrate that GILC achieves state-of-the-art performance without additional training, frequently outperforming fine-tuning approaches.
Spatiotemporal Degradation-Aware 3D Gaussian Splatting for Realistic Underwater Scene Reconstruction
Apr 26, 2026Reconstructing realistic underwater scenes from underwater video remains a meaningful yet challenging task in the multimedia domain. The inherent spatiotemporal degradations in underwater imaging, including caustics, flickering, attenuation, and backscattering, frequently result in inaccurate geometry and appearance in existing 3D reconstruction methods. While a few recent works have explored underwater degradation-aware reconstruction, they often address either spatial or temporal degradation alone, falling short in more real-world underwater scenarios where both types of degradation occur. We propose MarineSTD-GS, a novel 3D Gaussian Splatting-based framework that explicitly models both temporal and spatial degradations for realistic underwater scene reconstruction. Specifically, we introduce two paired Gaussian primitives: Intrinsic Gaussians represent the true scene, while Degraded Gaussians render the degraded observations. The color of each Degraded Gaussian is physically derived from its paired Intrinsic Gaussian via a Spatiotemporal Degradation Modeling (SDM) module, enabling self-supervised disentanglement of realistic appearance from degraded images. To ensure stable training and accurate geometry, we further propose a Depth-Guided Geometry Loss and a Multi-Stage Optimization strategy. We also construct a simulated benchmark with diverse spatial and temporal degradations and ground-truth appearances for comprehensive evaluation. Experiments on both simulated and real-world datasets show that MarineSTD-GS robustly handles spatiotemporal degradations and outperforms existing methods in novel view synthesis with realistic, water-free scene appearances.
* 12 pages, 10 figures, 6 tables. Author version of the paper published in Proceedings of ACM Multimedia 2025
Constrained Particle Seeking: Solving Diffusion Inverse Problems with Just Forward Passes
Mar 02, 2026Diffusion models have gained prominence as powerful generative tools for solving inverse problems due to their ability to model complex data distributions. However, existing methods typically rely on complete knowledge of the forward observation process to compute gradients for guided sampling, limiting their applicability in scenarios where such information is unavailable. In this work, we introduce \textbf{\emph{Constrained Particle Seeking (CPS)}}, a novel gradient-free approach that leverages all candidate particle information to actively search for the optimal particle while incorporating constraints aligned with high-density regions of the unconditional prior. Unlike previous methods that passively select promising candidates, CPS reformulates the inverse problem as a constrained optimization task, enabling more flexible and efficient particle seeking. We demonstrate that CPS can effectively solve both image and scientific inverse problems, achieving results comparable to gradient-based methods while significantly outperforming gradient-free alternatives. Code is available at https://github.com/deng-ai-lab/CPS.
DPoser-X: Diffusion Model as Robust 3D Whole-body Human Pose Prior
Aug 01, 2025We present DPoser-X, a diffusion-based prior model for 3D whole-body human poses. Building a versatile and robust full-body human pose prior remains challenging due to the inherent complexity of articulated human poses and the scarcity of high-quality whole-body pose datasets. To address these limitations, we introduce a Diffusion model as body Pose prior (DPoser) and extend it to DPoser-X for expressive whole-body human pose modeling. Our approach unifies various pose-centric tasks as inverse problems, solving them through variational diffusion sampling. To enhance performance on downstream applications, we introduce a novel truncated timestep scheduling method specifically designed for pose data characteristics. We also propose a masked training mechanism that effectively combines whole-body and part-specific datasets, enabling our model to capture interdependencies between body parts while avoiding overfitting to specific actions. Extensive experiments demonstrate DPoser-X's robustness and versatility across multiple benchmarks for body, hand, face, and full-body pose modeling. Our model consistently outperforms state-of-the-art alternatives, establishing a new benchmark for whole-body human pose prior modeling.
You Only Look One Step: Accelerating Backpropagation in Diffusion Sampling with Gradient Shortcuts
May 12, 2025Diffusion models (DMs) have recently demonstrated remarkable success in modeling large-scale data distributions. However, many downstream tasks require guiding the generated content based on specific differentiable metrics, typically necessitating backpropagation during the generation process. This approach is computationally expensive, as generating with DMs often demands tens to hundreds of recursive network calls, resulting in high memory usage and significant time consumption. In this paper, we propose a more efficient alternative that approaches the problem from the perspective of parallel denoising. We show that full backpropagation throughout the entire generation process is unnecessary. The downstream metrics can be optimized by retaining the computational graph of only one step during generation, thus providing a shortcut for gradient propagation. The resulting method, which we call Shortcut Diffusion Optimization (SDO), is generic, high-performance, and computationally lightweight, capable of optimizing all parameter types in diffusion sampling. We demonstrate the effectiveness of SDO on several real-world tasks, including controlling generation by optimizing latent and aligning the DMs by fine-tuning network parameters. Compared to full backpropagation, our approach reduces computational costs by $\sim 90\%$ while maintaining superior performance. Code is available at https://github.com/deng-ai-lab/SDO.
Image Restoration via Multi-domain Learning
May 07, 2025



Due to adverse atmospheric and imaging conditions, natural images suffer from various degradation phenomena. Consequently, image restoration has emerged as a key solution and garnered substantial attention. Although recent Transformer architectures have demonstrated impressive success across various restoration tasks, their considerable model complexity poses significant challenges for both training and real-time deployment. Furthermore, instead of investigating the commonalities among different degradations, most existing restoration methods focus on modifying Transformer under limited restoration priors. In this work, we first review various degradation phenomena under multi-domain perspective, identifying common priors. Then, we introduce a novel restoration framework, which integrates multi-domain learning into Transformer. Specifically, in Token Mixer, we propose a Spatial-Wavelet-Fourier multi-domain structure that facilitates local-region-global multi-receptive field modeling to replace vanilla self-attention. Additionally, in Feed-Forward Network, we incorporate multi-scale learning to fuse multi-domain features at different resolutions. Comprehensive experimental results across ten restoration tasks, such as dehazing, desnowing, motion deblurring, defocus deblurring, rain streak/raindrop removal, cloud removal, shadow removal, underwater enhancement and low-light enhancement, demonstrate that our proposed model outperforms state-of-the-art methods and achieves a favorable trade-off among restoration performance, parameter size, computational cost and inference latency. The code is available at: https://github.com/deng-ai-lab/SWFormer.
Physics-aligned Schrödinger bridge
Sep 26, 2024



The reconstruction of physical fields from sparse measurements is pivotal in both scientific research and engineering applications. Traditional methods are increasingly supplemented by deep learning models due to their efficacy in extracting features from data. However, except for the low accuracy on complex physical systems, these models often fail to comply with essential physical constraints, such as governing equations and boundary conditions. To overcome this limitation, we introduce a novel data-driven field reconstruction framework, termed the Physics-aligned Schr\"{o}dinger Bridge (PalSB). This framework leverages a diffusion Schr\"{o}dinger bridge mechanism that is specifically tailored to align with physical constraints. The PalSB approach incorporates a dual-stage training process designed to address both local reconstruction mapping and global physical principles. Additionally, a boundary-aware sampling technique is implemented to ensure adherence to physical boundary conditions. We demonstrate the effectiveness of PalSB through its application to three complex nonlinear systems: cylinder flow from Particle Image Velocimetry experiments, two-dimensional turbulence, and a reaction-diffusion system. The results reveal that PalSB not only achieves higher accuracy but also exhibits enhanced compliance with physical constraints compared to existing methods. This highlights PalSB's capability to generate high-quality representations of intricate physical interactions, showcasing its potential for advancing field reconstruction techniques.
DPoser: Diffusion Model as Robust 3D Human Pose Prior
Dec 09, 2023

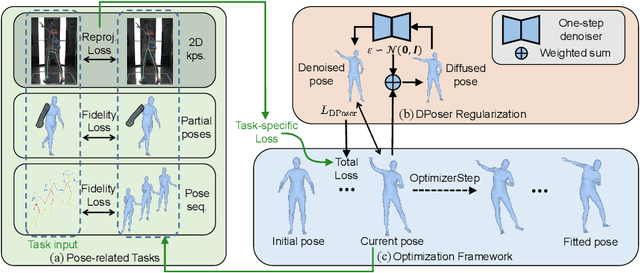

Modeling human pose is a cornerstone in applications from human-robot interaction to augmented reality, yet crafting a robust human pose prior remains a challenge due to biomechanical constraints and diverse human movements. Traditional priors like VAEs and NDFs often fall short in realism and generalization, especially in extreme conditions such as unseen noisy poses. To address these issues, we introduce DPoser, a robust and versatile human pose prior built upon diffusion models. Designed with optimization frameworks, DPoser seamlessly integrates into various pose-centric applications, including human mesh recovery, pose completion, and motion denoising. Specifically, by formulating these tasks as inverse problems, we employ variational diffusion sampling for efficient solving. Furthermore, acknowledging the disparity between the articulated poses we focus on and structured images in previous research, we propose a truncated timestep scheduling to boost performance on downstream tasks. Our exhaustive experiments demonstrate DPoser's superiority over existing state-of-the-art pose priors across multiple tasks.