 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePellet-based 3D Printing of Soft Thermoplastic Elastomeric Membranes for Soft Robotic Applications
Mar 26, 2025Additive Manufacturing (AM) is a promising solution for handling the complexity of fabricating soft robots. However, the AM of hyperelastic materials is still challenging with limited material types. Within this work, pellet-based 3D printing of very soft thermoplastic elastomers (TPEs) was explored. Our results show that TPEs can have similar engineering stress and maximum strain as Ecoflex OO-10. These TPEs were used to 3D-print airtight thin membranes (0.2-1.2 mm), which could inflate up to a stretch of 1320\%. Combining the membrane's large expansion and softness with the 3D printing of hollow structures simplified the design of a bending actuator that can bend 180 degrees and reach a blocked force of 238 times its weight. In addition, by 3D printing TPE pellets and rigid filaments, the soft membrane could grasp objects by enveloping an object or as a sensorized sucker, which relied on the TPE's softness to conform to the object or act as a seal. In addition, the membrane of the sucker was utilized as a tactile sensor to detect an object before adhesion. These results suggest the feasibility of 3D printing soft robots by using soft TPEs and membranes as an interesting class of materials and sensorized actuators, respectively.
Neuromuscular Modeling for Locomotion with Wearable Assistive Robots -- A primer
Jul 19, 2024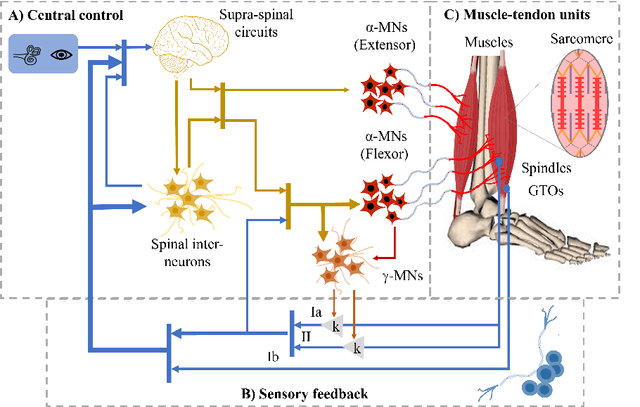
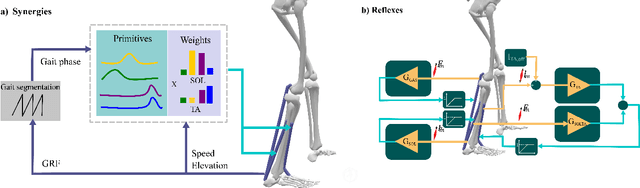

Wearable assistive robots (WR) for the lower extremity are extensively documented in literature. Various interfaces have been designed to control these devices during gait and balance activities. However, achieving seamless and intuitive control requires accurate modeling of the human neuromusculoskeletal (NMSK) system. Such modeling enables WR to anticipate user intentions and determine the necessary joint assistance. Despite the existence of controllers interfacing with the NMSK system, robust and generalizable techniques across different tasks remain scarce. Designing these novel controllers necessitates the combined expertise of neurophysiologists, who understand the physiology of movement initiation and generation, and biomechatronic engineers, who design and control devices that assist movement. This paper aims to bridge the gaps between these fields by presenting a primer on key concepts and the current state of the science in each area. We present three main sections: the neuromechanics of locomotion, neuromechanical models of movement, and existing neuromechanical controllers used in WR. Through these sections, we provide a comprehensive overview of seminal studies in the field, facilitating collaboration between neurophysiologists and biomechatronic engineers for future advances in wearable robotics for locomotion.
Adaptive Assistance with an Active and Soft Back-Support Exosuit to Unknown External Loads via Model-Based Estimates of Internal Lumbosacral Moments
Nov 03, 2023State of the art controllers for back exoskeletons largely rely on body kinematics. This results in control strategies which cannot provide adaptive support under unknown external loads. We developed a neuromechanical model-based controller (NMBC) for a soft back exosuit, wherein assistive forces were proportional to the active component of lumbosacral joint moments, derived from real-time electromyography-driven models. The exosuit provided adaptive assistance forces with no a priori information on the external loading conditions. Across 10 participants, who stoop-lifted 5 and 15 kg boxes, our NMBC was compared to a non-adaptive virtual spring-based control(VSBC), in which exosuit forces were proportional to trunk inclination. Peak cable assistive forces were modulated across weight conditions for NMBC (5kg: 2.13 N/kg; 15kg: 2.82 N/kg) but not for VSBC (5kg: 1.92 N/kg; 15kg: 2.00 N/kg). The proposed NMBC strategy resulted in larger reduction of cumulative compression forces for 5 kg (NMBC: 18.2%; VSBC: 10.7%) and 15 kg conditions (NMBC: 21.3%; VSBC: 10.2%). Our proposed methodology may facilitate the adoption of non-hindering wearable robotics in real-life scenarios.
3D Printed Graded Porous Sensors for Soft Sensorized Insoles with Gait Phase & Ground Reaction Forces Estimation
Mar 08, 2023Sensorized insoles provide a tool to perform gait studies and health monitoring during daily life. These sensorized insoles need to be comfortable and lightweight to be accepted. Previous work has already demonstrated that sensorized insoles are possible and can estimate both ground reaction force and gait cycle. However, these are often assemblies of commercial components restricting design freedom and flexibility. Within this work, we investigate the feasibility of using four 3D-printed porous (foam-like) piezoresistive sensors embedded in a commercial insole. These sensors were evaluated using an instrumented treadmill as the golden standard. It was observed that the four sensors behaved in line with the expected change in pressure distribution during the gait cycle. In addition, Hammerstein-Wiener models were identified that were capable of estimating the vertical and mediolateral ground reaction forces (GRFs). Their NRMSE fits were on average 82% and 73%, respectively. Similarly, for the averaged gait cycle the R^2 values were 0.98 and 0.99 with normalized RMS errors overall below 6%. These values were comparable with other insoles based on commercial force sensing resistors but at a significantly lower cost (over four times cheaper). Thereby indicating that our 3D-printed sensors can be an interesting option for sensorized insoles. The advantage of 3D printing these sensors is that it allows for significantly more design freedom, reduces assembly, and is cheaper. However, further research is needed to exploit this design freedom for complex sensors, estimate the anteroposterior GRF, and fully 3D print the entire insole.
3D Printed Proprioceptive Soft Fluidic Actuators with graded porosity
Feb 25, 2023Integration of both actuation and proprioception into the robot body enables sensorized soft actuators that can operate in a closed loop. An interesting class of actuators for this purpose are graded porous actuators, which can be mechanically programmed by their porosity (gradient) and sensorized by using a smart material. Three types of such actuators were 3D printed, namely: a bending finger, contractor, and a three DoF bending segment. Piezoresistive sensing was embedded by printing with a conductive thermoplastic elastomer. A challenge with piezoresistive sensors is to relate the change in resistance to deformation due to their inherent hysteresis and nonlinearity. In this work, an (estimated) Wiener-Hammerstein (WH) model was used to predict the deformation. The bending and contracting actuators showed that the linear and WH models could reach 70+% and 80+% fits, respectively. Thereby indicating that the deformation of the printed actuators could be estimated quite well. Similarly, the 3DoF bending segment showed similar values with the WH model reducing both the fitting and RMS error on average with 20+%. These results indicate that sensorized actuators based on 3D-printed soft structures with a porosity gradient can be mechanically programmed whereas strain estimation can be done using identified Wiener-Hammerstein models.
Direct 3D Printing of Soft Fluidic Actuators with Graded Porosity
Apr 26, 2022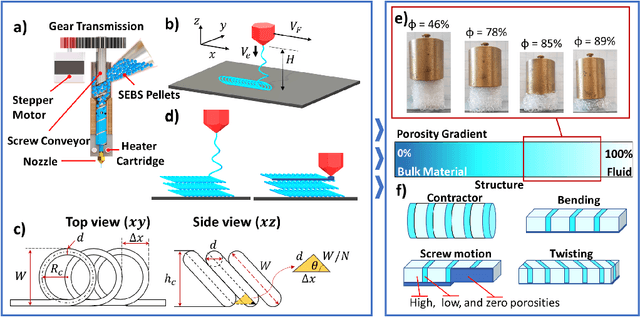
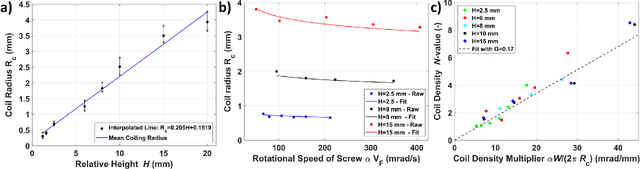
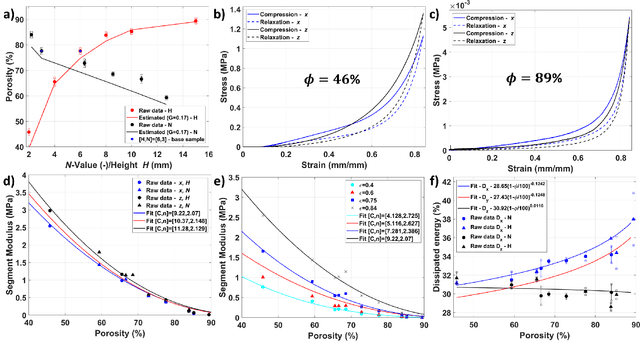
New additive manufacturing methods are needed to realize more complex soft robots. One example is soft fluidic robotics, which exploits fluidic power and stiffness gradients. Porous structures are an interesting type for this approach, as they are flexible and allow for fluid transport. Within this work, the Infill-Foam (InFoam) is proposed to print structures with graded porosity by liquid rope coiling (LRC). By exploiting LRC, the InFoam method could exploit the repeatable coiling patterns to print structures. To this end, only the characterization of the relation between nozzle height and coil radius and the extruded length were necessary (at a fixed temperature). Then by adjusting the nozzle height and/or extrusion speed the porosity of the printed structure could be set. The InFoam method was demonstrated by printing porous structures using styrene-ethylene-butylene-styrene (SEBS) with porosities ranging from 46\% to 89\%. In compression tests, the cubes showed large changes in modulus (more than 200 times), density (-89\% compared to bulk), and energy dissipation. The InFoam method combined coiling and normal plotting to realize a large range of porosity gradients. This grading was exploited to realize rectangular structures with varying deformation patterns, which included twisting, contraction, and bending. Furthermore, the InFoam method was shown to be capable of programming the behavior of bending actuators by varying the porosity. Both the output force and stroke showed correlations similar to those of the cubes. Thus, the InFoam method can fabricate and program the mechanical behavior of a soft fluidic (porous) actuator by grading porosity.
Feasible Wrench Set Computation for Legged Robots
Feb 03, 2022


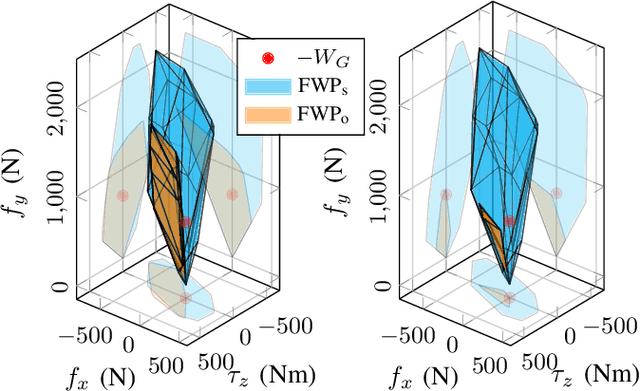
During locomotion, legged robots interact with the ground by sequentially establishing and breaking contact. The interaction wrenches that arise from contact are used to steer the robot's Center of Mass (CoM) and reject perturbations that make the system deviate from the desired trajectory and often make them fall. The feasibility of a given control target (desired CoM wrench or acceleration) is conditioned by the contact point distribution, ground friction, and actuation limits. In this work, we develop an algorithm to compute the set of feasible wrenches that a legged robot can exert on its CoM through contact. The presented method can be used with any amount of non-coplanar contacts and takes into account actuation limits and limitations based on an inelastic contact model with Coulomb friction. This is exemplified with a planar biped model standing with the feet at different heights. Exploiting assumptions from the contact model, we explain how to compute the set of wrenches that are feasible on the CoM when the contacts remain in position as well as the ones that are feasible when some of the contacts are broken. Therefore, this algorithm can be used to assess whether a switch in contact configuration is feasible while achieving a given control task. Furthermore, the method can be used to identify the directions in which the system is not actuated (i.e. a wrench cannot be exerted in those directions). We show how having a joint be actuated or passive can change the non-actuated wrench directions of a robot at a given pose using a spatial model of a lower-extremity exoskeleton. Therefore, this algorithm is also a useful tool for the design phase of the system. This work presents a useful tool for the control and design of legged systems that extends on the current state of the art.
Evaluation and comparison of SEA torque controllers in a unified framework
Jan 03, 2022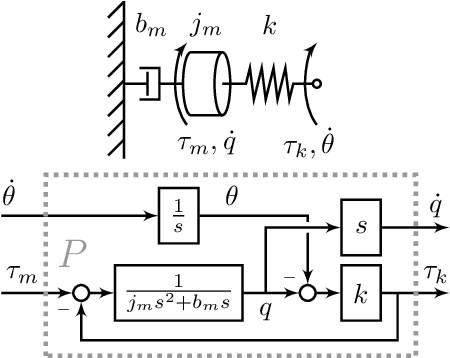
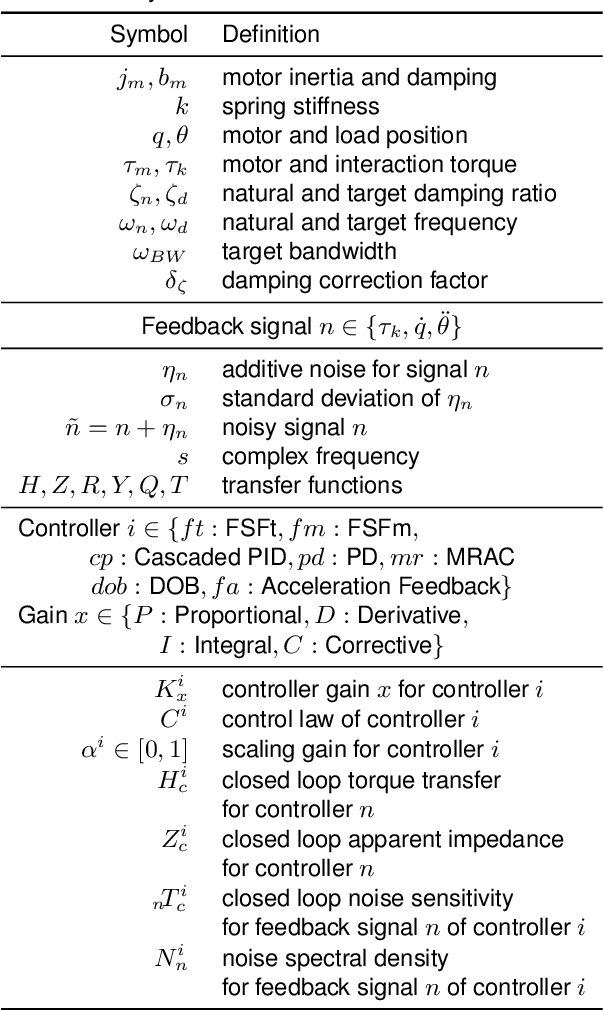
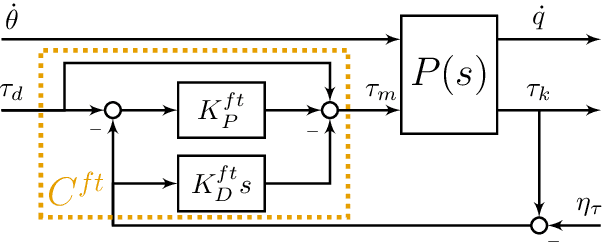
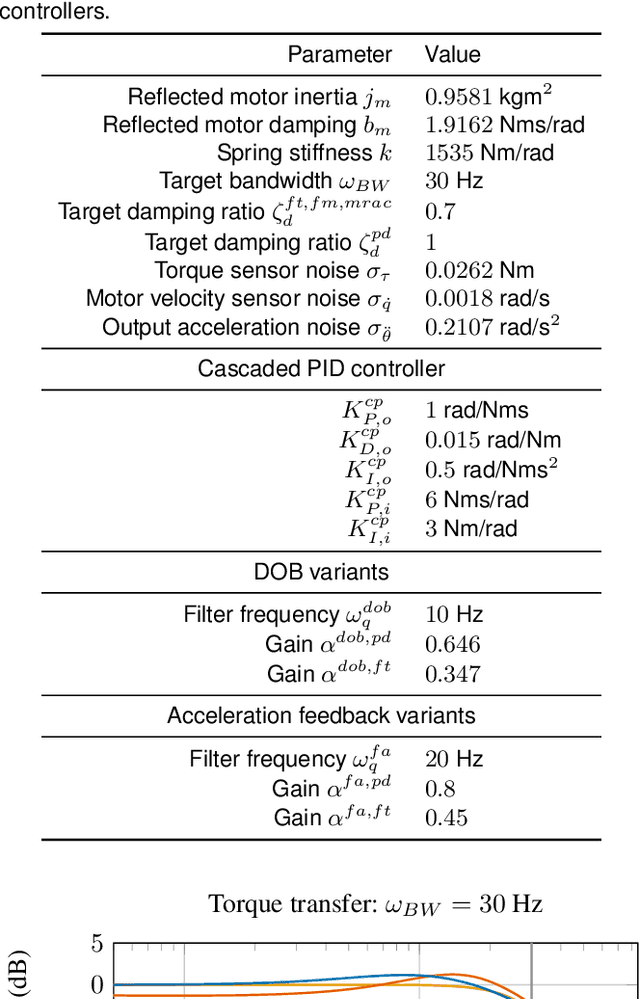
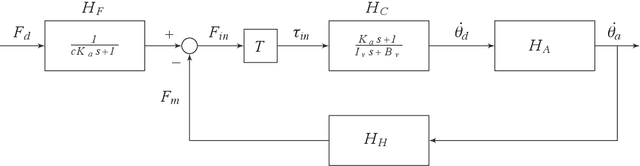
Series elastic actuators (SEA) with their inherent compliance offer a safe torque source for robots that are interacting with various environments, including humans. These applications have high requirements for the SEA torque controllers, both in the torque response as well as interaction behavior with its the environment. To differentiate state of the art torque controllers, this work is introducing a unifying theoretical and experimental framework that compares controllers based on their torque transfer behavior, their apparent impedance behavior, and especially the passivity of the apparent impedance, i.e. their interaction stability, as well as their sensitivity to sensor noise. We compare classical SEA control approaches such as cascaded PID controllers and full state feedback controllers with advanced controllers using disturbance observers, acceleration feedback and adaptation rules. Simulations and experiments demonstrate the trade-off between stable interactions, high bandwidths and low noise levels. Based on these tradeoffs, an application specific controller can be designed and tuned, based on desired interaction with the respective environment.
A Device and Method to Identify Hip, Knee and Ankle Joint Impedance During Walking
Dec 10, 2021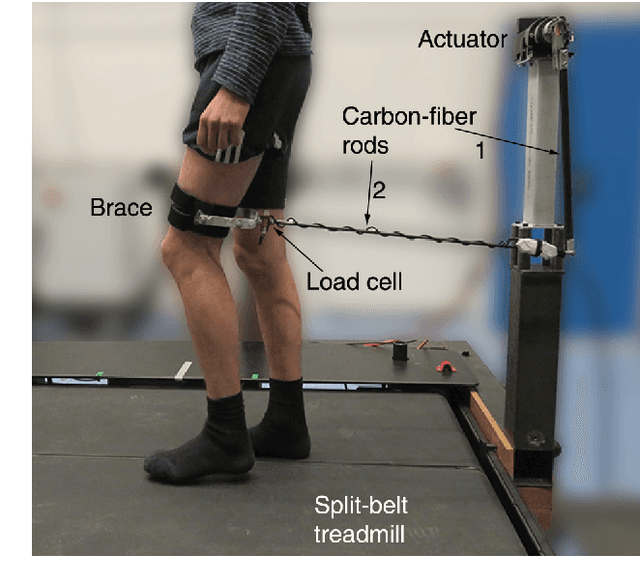
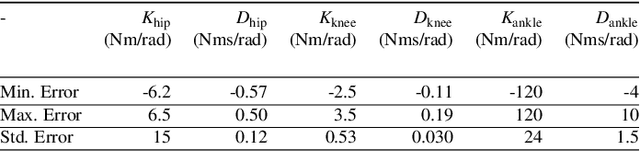

Knowledge on joint impedance during walking in various conditions is relevant for clinical decision making and the development of robotic gait trainers, leg prostheses, leg orthotics, and wearable exoskeletons. Whereas ankle impedance during walking has been experimentally assessed, knee and hip joint impedance during walking have not been identified yet. Here we developed and evaluated a lower limb perturbator to identify hip, knee and ankle joint impedance during treadmill walking. The lower limb perturbator (LOPER) consists of an actuator connected to the thigh via rods. The LOPER allows to apply force perturbations to a free-hanging leg, while standing on the contralateral leg, with a bandwidth of up to 39Hz. While walking in minimal impedance mode, the interaction forces between LOPER and the thigh were low (<5N) and the effect on the walking pattern was smaller than the within-subject variability during normal walking. Using a non-linear multibody dynamical model of swing leg dynamics, the hip, knee and ankle joint impedance were estimated at three time points during the swing phase for nine subjects walking at a speed of 0.5 m/s. The identified model was well able to predict the experimental responses, since the mean variance accounted for was 99%, 96%, and 77%, for the hip, knee and ankle respectively. The averaged across subjects stiffness varied between the three time point within 34-66 Nm/rad, 0-3.5 Nm/rad, and 2.5-24 Nm/rad for the hip, knee and ankle joint respectively. The damping varied between 1.9-4.6 Nms/rad, 0.02-0.14 Nms/rad, and 0.2-2.4 Nms/rad for hip, knee, and ankle respectively. The developed LOPER has a negligible effect on the unperturbed walking pattern and allows to identify hip, knee and ankle joint impedance during the swing phase.
Neuromechanical model-based control of bi-lateral ankle exoskeletons: biological joint torque and electromyogram reduction across walking conditions
Aug 02, 2021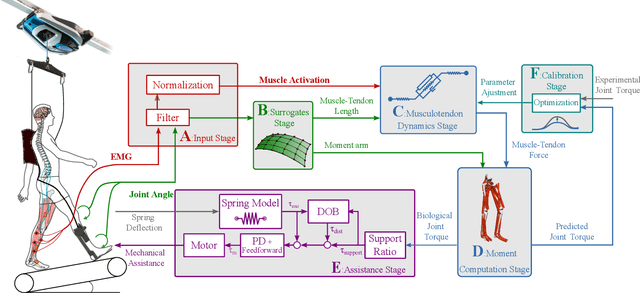
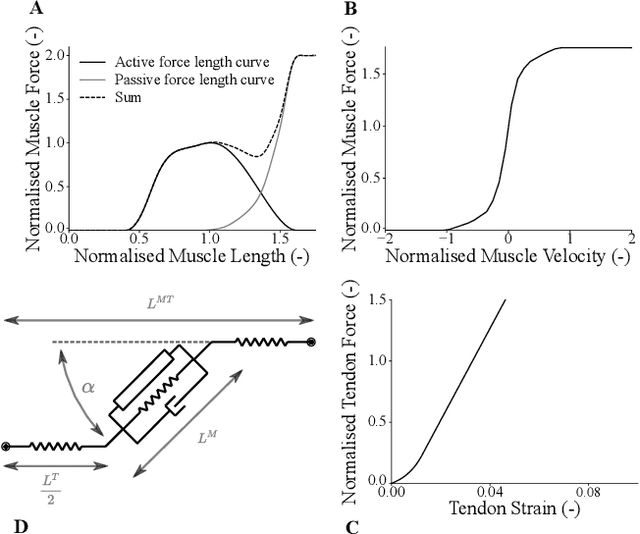
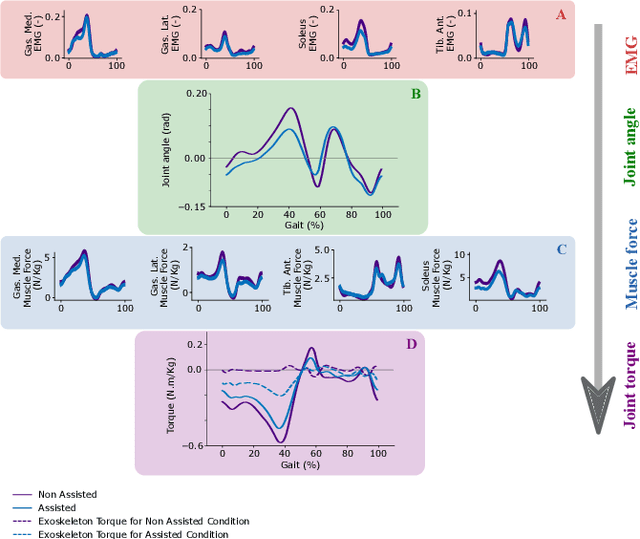
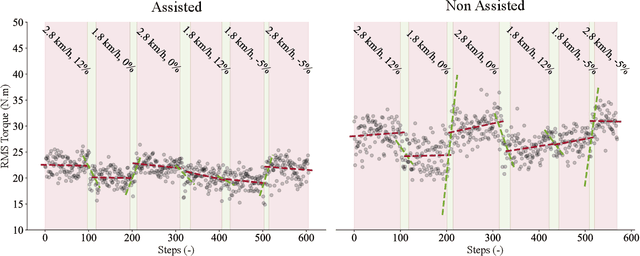
To enable the broad adoption of wearable robotic exoskeletons in medical and industrial settings, it is crucial they can effectively support large repertoires of movements. We propose a new human-machine interface to drive bilateral ankle exoskeletons during a range of 'unseen' walking conditions that were not used for establishing the control interface. The proposed approach uses person-specific neuromechanical models of the human body to estimate biological ankle torques in real-time from electromyograms (EMGS) and joint angles. A low-level controller based on a disturbance observer translates biological torque estimates into exoskeleton commands. We call this 'neuromechanical model-based control' (NMBC). NMBC enabled five individuals to voluntarily control exoskeletons across two walking speeds performed at three ground elevations with no need for predefined torque profiles, nor a prior chosen neuromuscular reflex rules, or state machines as common in literature. Furthermore, a single subject case study was carried out on a dexterous moonwalk task, showing reduction in muscular effort. NMBC enabled reducing biological ankle torques as well as eight ankle muscle EMGs both within (22% for the torque; 13% for the EMG) and between walking conditions (22% for the torque; 13% for the EMG) when compared to non-assisted conditions. Torque and EMG reduction in novel walking conditions indicated the exoskeleton operated symbiotically as an exomuscle controlled by the operator's neuromuscular system. This will open new avenues for systematic adoption of wearable robots in out-of-the-lab medical and occupational settings.